前言
不开心,不想说话……让我们直接进入这段有趣的学习之旅吧,试试两个月,甚至更短的时间内解决掉这门又臭又长的课程。
Bits, Bytes, and Integers
Representation information as bits
Everything is bits
Each bit is 0 or 1
By encoding/interpreting sets of bits in various ways
- Computers determine what to do (instructions)
- … and represent and manipulate numbers, sets, strings, etc…
Why bits ? Electronic Implementation
- Easy to store with bitsable elements
- Reliably transmitted on noisy and inaccurate wires
- Easy to indicate low level/high level

Bit-level manipulations
Representing & Manipulating Sets
Representing Sets
We can use bits to determine whether an element belongs to a set. Say each bit have index, which corresponds to a number from zero. If a bit is set to 1, it means the corresponding index (i.e., the element) is in the set. Otherwise, its not.
In a more mathematical representation way:
- Width bit vector represents subsets subsets of
- if
Sets Operations
&is related to Intersection|is related to Union~is related to Complement^is related to Symmetric difference
Shift Operations
Left Shift: x << y
- Shift bit-vector
xleftypositions- Throw away extra bits on left
- Fill with 0’s on right
Right Shift: x >> y
- Shift bit-vector
xrightypositions- Throw away extra bits on right
- Logical shift
- Fill with 0’s on left
- Arithmetic shift
- Replicate most significant bit on left
Undefined Behaviour
- Shift amount 0
- Shift amount word size
- Left shift a signed value
Integers
Representation: unsigned and signed
Unsigned
Two’s Complement
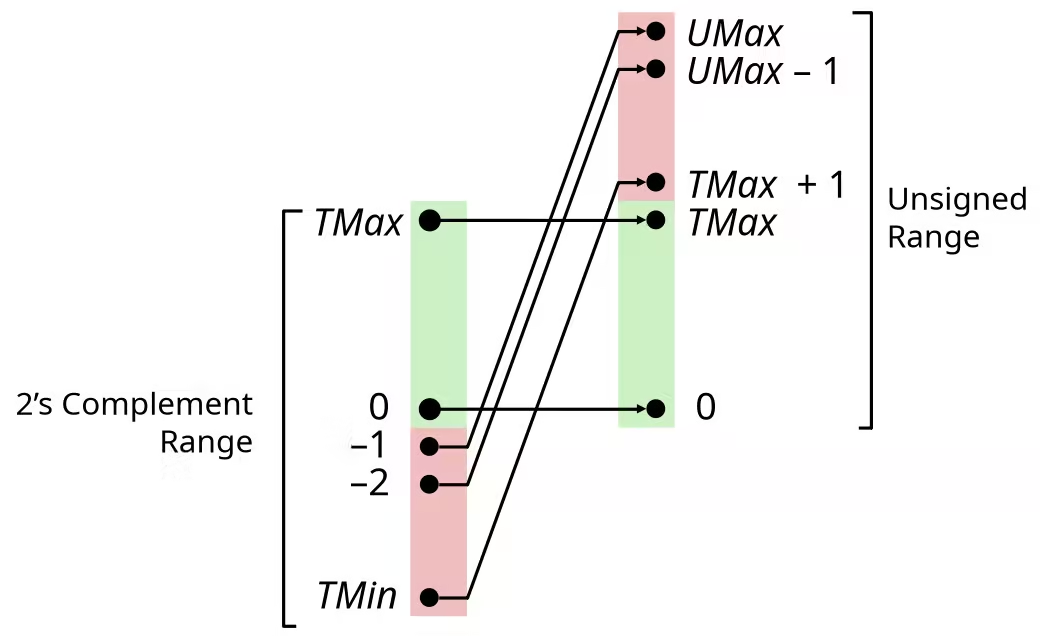
Invert mappings
Numeric Ranges
-
Unsigned Values
-
Two’s Complement Values
TIPIn C, these ranges are declared in
limits.h. E.g.,ULONG_MAX,LONG_MAX,LONG_MIN. Values are platform specific.
Observations
-
- Asymmetric range (Every positive value can be represented as a negative value, but cannot be represented as a positive value)
Difference between Unsigned & Signed Numeric Values
The difference between Unsigned & Signed Numeric Values is .
For example, if you want convert a unsigned numeric value to its signed form, just use this value minus , or if you want convert a signed numeric value to its unsigned form, you plus .
Conversion, casting
Mappings between unsigned and two’s complement numbers keep bit representations and reinterpret.
For example, casting a signed value to its unsigned form, the most significant bit from large negative weight becomes to large positive weight and vice versa.
Constants
- By default are considered to be signed integers
- Unsigned if have “U” as suffix
Casting
- Explicit casting between signed & unsigned same as and
- Implicit casting also occurs via assignments and procedure call (assignments will casting to lhs’s type)
Expression Evaluation
- If there is a mix of unsigned and signed in single expression, signed values implicitly cast to unsigned
- Including comparison operations
<,>,==,<=,>
| Constants 1 | Constants 2 | Relation | Evaluation |
|---|---|---|---|
0 | 0U | == | unsigned |
-1 | 0 | < | signed |
-1 | 0U | > | unsigned |
2147483647 | -2147483647-1 | > | signed |
2147483647U | -2147483647-1 | < | unsigned |
-1 | -2 | > | signed |
(unsigned)-1 | -2 | > | unsigned |
2147483647 | 2147483648U | < | unsigned |
2147483647 | (int)2147483648U | > | signed |
Expanding, truncating
Sign Extension
- Make copies of sign bit
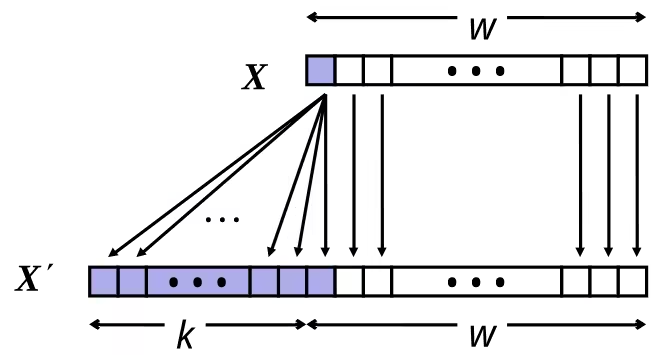
WARNINGConverting from smaller to larger integer data type. C automatically performs sign extension.
Expanding (e.g., short int to int)
- Unsigned: zeros added
- Signed: sign extension
- Both yield expected result
Truncating (e.g., unsigned to unsigned short)
- Unsigned/signed: bits are truncated
- Result reinterpreted
- Unsigned: mod operation
- Signed: similar to mod
- For small numbers yields expected behavior
Addition, negation, multiplication, shifting
Unsigned Addition
- Standard Addition Function
- Ignore carry output
- Implements Modular Arithmetic

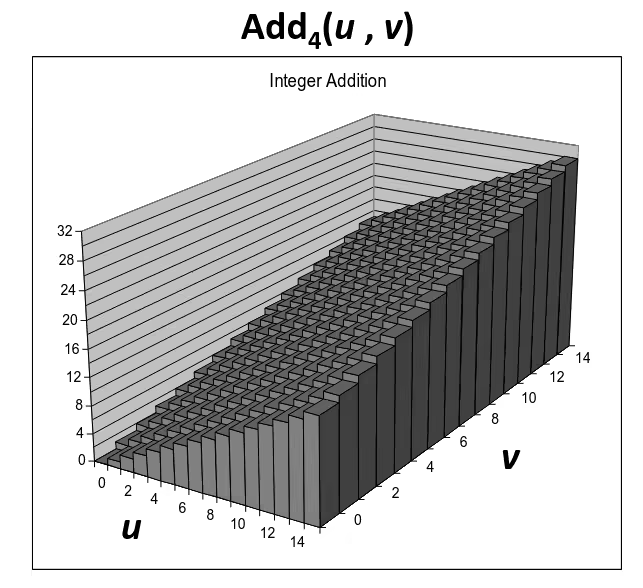
Visualizing (Mathematical) Integer Addition
- Integer Addition
- 4-bit integers
- Compute true sum
- Values increase linearly with and
- Forms planar surface
Visualizing Unsigned Addition
- Wraps Around
- If true sum
- At most once

Two’s Complement Addition
- and have Identical Bit-level Behaviour
Signed vs. Unsigned Addition in C:
int s, t, u, v;
s = (int)((unsigned)u + (unsigned)v);t = u + v;
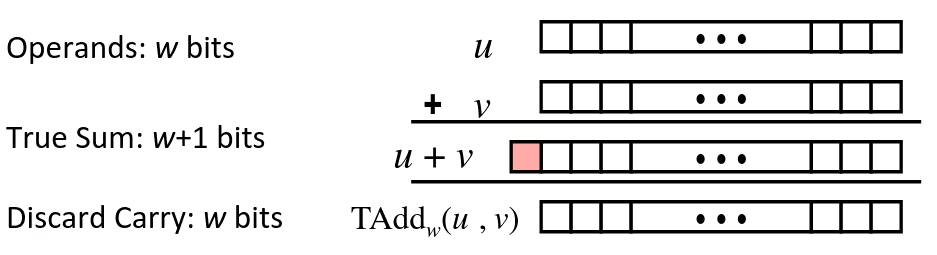
// will give s == tTAdd Overflow
- Functionality
- True sum requires bits
- Drop off MSB
- Treat remaining bits as two’s complement integer

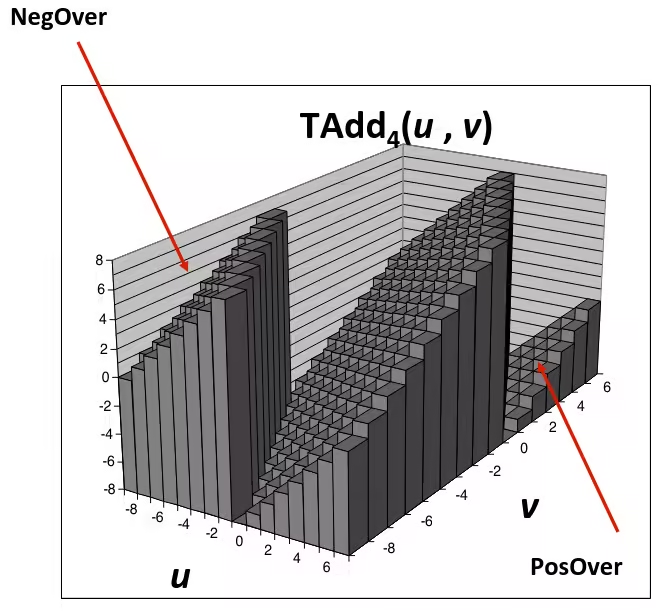
Visualizing Two’s Complement Addition
- Values
- 4-bit two’s comp.
- Range from to
- Wraps Around
- If sum
- Becomes negative
- At most once
- If sum
- Becomes positive
- At most once
- If sum
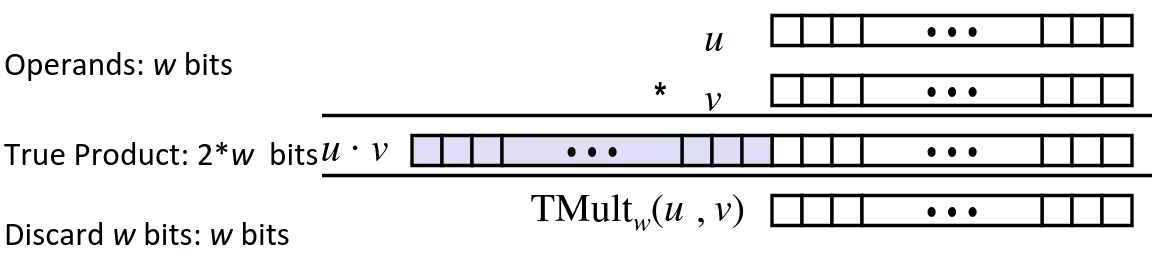
Multiplication
- Goal: Computing Product of -bit numbers
- Either signed or unsigned
- But, exact results can be bigger than bits
- Unsigned: up to bits
- Result range:
- Two’s complement min (negative): Up to bits
- Result range:
- Two’s complement max (positive): Up to bits, but only for
- Result range:
- Unsigned: up to bits
- So, maintaining exact results…
- would need to keep expanding word size with each product computed (exhaust memory faster)
- is done in software, if needed
- e.g., by “arbitrary precision” arithmetic packages
Unsigned Multiplication in C
- Standard Multiplication Function
- Ignore high order bits
- Implements Modular Arithmetic

Signed Multiplication in C
- Standard Multiplication Function
- Ignore high order bits
- Some of which are different for signed vs. unsigned multiplication
- Lower bits are the same
Power-of-2 Multiply with Shift
- Operation
u << kgives (basically increases each bits weight)- Both signed and unsigned

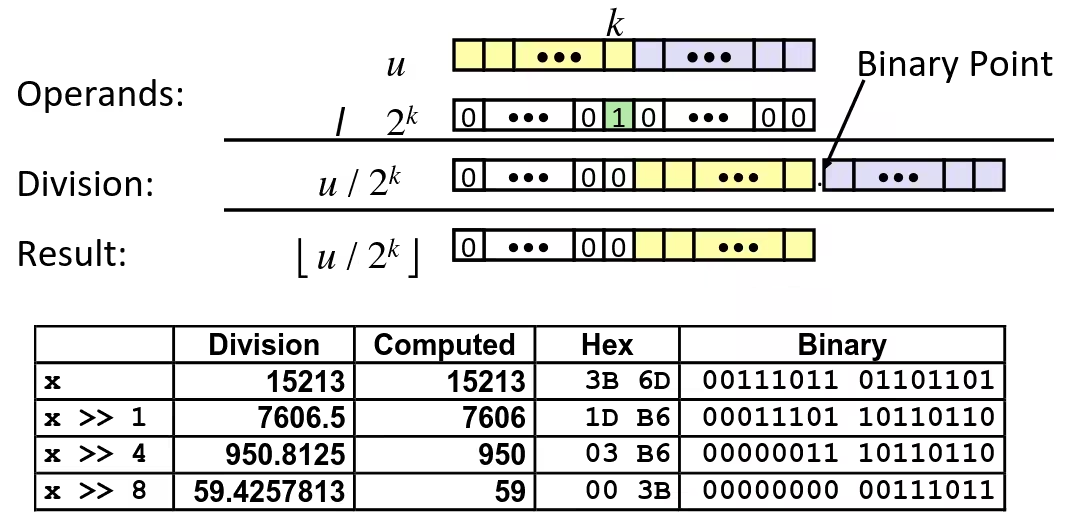
Unsigned Power-of-2 Divide with Shift
- Quotient of Unsigned by Power of 2
u >> kgives- Uses logical shift
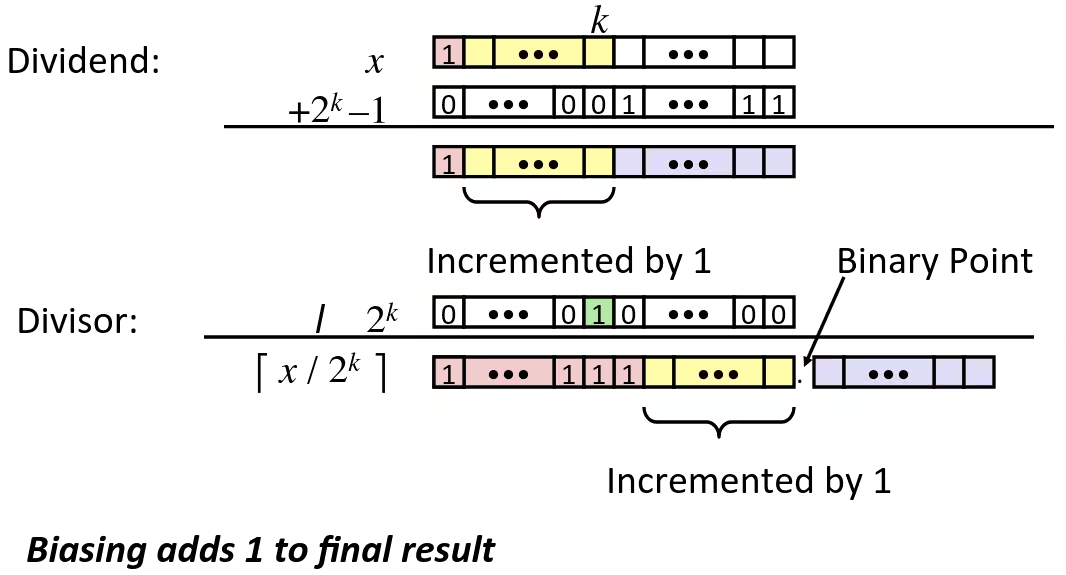
Signed Power-of-2 Divide with Shift
- Quotient of Signed by Power of 2
- Uses arithmetic shift
- Want (Round toward 0)
- Compute as
- In C:
(x + (1 << k) - 1) >> k - Biases dividend toward 0
- In C:
Case 1: No rounding

Case 2: Rounding
Handy tricks
If you want convert a value to its negative form by hand or in mind, either unsigned or signed.
Just do:
When Should I Use Unsigned ?
CAUTIONDon’t use without understanding implications!
- Do use when performing modular arithmetic
- Multiplication arithmetic
- Do use when using bits to represent sets
- Logical right shift, no sign extension
Representation in memory, pointers, strings
Byte-Oriented Memory Organization
- Programs refer to data by address
- Conceptually, envision it as a very large array of bytes
- In reality, it’s not, but can think of it that way
- An address is like an index into that array
- and, a pointer variable stores an address
- Conceptually, envision it as a very large array of bytes
- System provides private address spaces to each “process”
- So, a program can clobber its own data, but not that of others
Machine Words
- Any given computer has a “Word Size”
- Nominal size of integer-valued data
- and of addresses
- Until recently, most machines used 32 bits (4 bytes) as word size
- Limits addresses to 4 GB ( bytes)
- Increasingly, machines have 64‐bit word size
- Potentially, could have 18 EB (exabytes) of addressable memory
- That’s bytes
- Machines still support multiple data formats
- Fractions or multiples of word size
- Always integral number of bytes
- Nominal size of integer-valued data
Word‐Oriented Memory Organization
- Addresses Specify Byte Locations
- Address of first byte in word
- Addresses of successive words differ by 4 (32‐bit) or 8 (64‐bit)
Byte Ordering
- Big Endian: Sun, PPC Mac, Internet
- Least significant byte has highest address
- Little Endian: x86, ARM processors running Android, iOS, and Windows
- Least significant byte has lowest address
Representation Strings
In C, either little endian or big endian machine, strings in memory represented in the same way, because a string is essentially an array of characters ends with \x00, each character is one byte encoded in ASCII format and single byte (character) do not obey the byte ordering rule.
Floating Point
Background: Fractional binary numbers
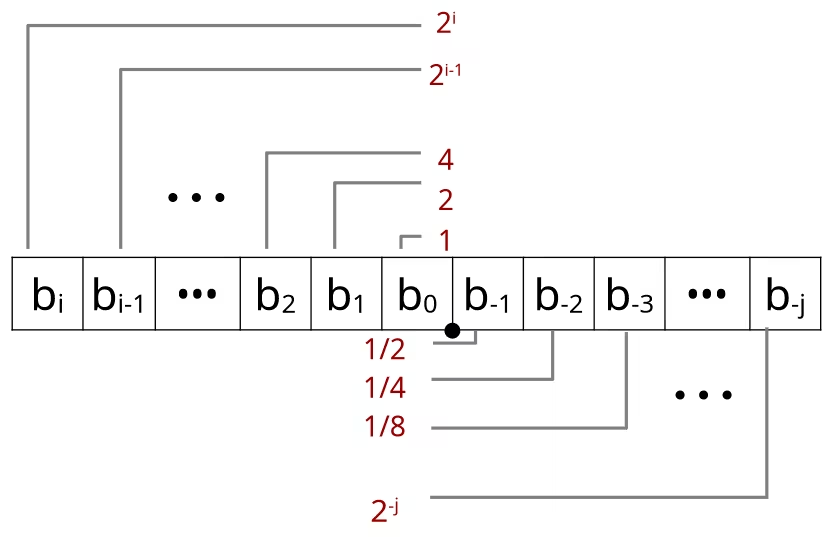
Representing
- Bits to right of “binary point” represent fractional powers of 2
- Represents rational number:
| Value | Representation |
|---|---|
Observations
- Divide by 2 by shifting right (unsigned)
- Multiply by 2 by shifting left
- Numbers of form are just below
- Use notation ( depends on how many bits you have to the right of the binary point. If it gets smaller the more, the more of those bits you have there, and it gets closer to )
Limitation 1
- Can only exactly represent numbers of the form
- Other rational numbers have repeating bit representations, but cause computer system can only hold a finite number of bits, so
| Value | Representation |
|---|---|
Limitation 2
- Just one setting of binary point within the bits
- Limited range of numbers (very small values ? very large ? we have to move the binary point to represent sort of wide as wide a range as possible with as much precision given the number of bits)
Definition: IEEE Floating Point Standard
IEEE Standard 754
Established in 1985 as uniform standard for floating point arithmetic. Before that, many idiosyncratic formats.
Although it provided nice standards for rounding, overflow, underflow… It is hard to make fast in hardware (Numerical analysts predominated over hardware designers in defining standard)
Floating Point Representation
Numerical form:
- Sign bit determines whether number is negative or positive
- Significand (Mantissa) normally a fractional value in range
- Exponent weights value by power of two
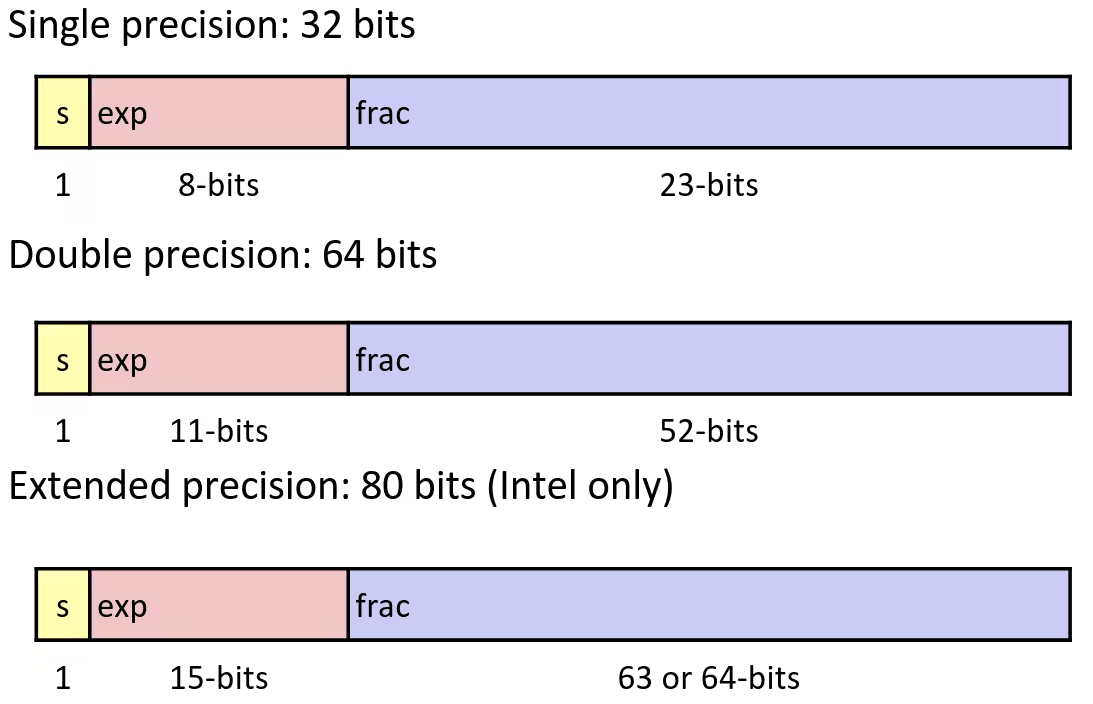
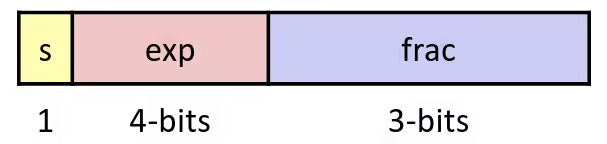
Encoding
- MSB
sis sign bit expfield encodes (but is not equal to )fracfield encodes (but is not equal to )
Normalized Values
- Condition: and
- Exponent coded as a biased value:
- is unsigned value of exp field
- , where is number of exponent bits
- Single precision: (, )
- Double precision: (, )
- Significand coded with implied leading :
- is bits of frac field
- Minimum when
- Maximum when
- Get extra leading bit for “free”
Normalized Encoding Example
- Value:
float F = 15213.0; - Significand
- Exponent
So the result would be:

# manually calculate((-1)**0)*(1+1/2+1/4+1/16+1/32+1/128+1/256+1/1024+1/2048+1/8192)*(2**13) == 15213.0
# by struct packageimport struct
bits = 0b01000110011011011011010000000000f = struct.unpack("f", struct.pack("I", bits))[0]
print(f)Denormalized Values
- Condition:
- Exponent value:
- Significand coded with implied leading :
- is bits of frac field
- Cases
-
- Represents zero value
- Note distinct values: and
-
- Numbers closet to
- Equispaced
-
Special Values
-
Condition:
-
Case:
- Represents value
- Operation that overflows
- Both positive and negative
- E.g.,
-
Case:
- Not-a-Number (NaN)
- Represents case when no numeric value can be determined
- E.g.,
Visualization: Floating Point Encodings

Example and properties
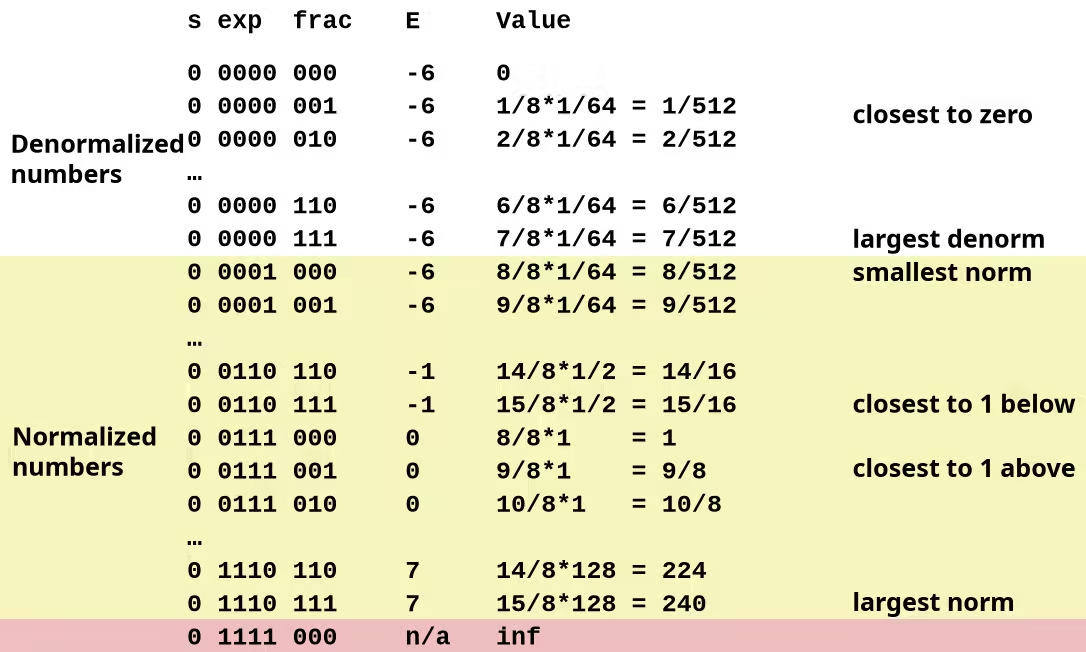
Tiny Floating Point Example
Think about this 8-bit Floating Point Representation below, it obeying the same general form as IEEE Format:
Dynamic Range (Positive Only)
Distribution of Values
Still think about our tiny example, notice how the distribution gets denser toward zero.

Here is a scaled close-up view:

Special Properties of the IEEE Encoding
- Floating Point Zero Same as Integer Zero
- All bits = 0
- Can (Almost) Use Unsigned Integer Comparison
- Must first compare sign bits
- Must consider
- NaNs problematic
- What should comparison yield ?
- Otherwise OK
- Denormalized vs. Normalized
- Normalized vs. Infinity
Rounding, addition, multiplication
Floating Point Operations: Basic Idea
Basic idea
- First compute exact result
- Make it fit into desired precision
- Possibly overflow if exponent too large
- Possibly round to fit into frac
Rounding
Rounding Modes (illustrate with $ rounding)
| $1.40 | $1.60 | $1.50 | $2.50 | -$1.50 | |
|---|---|---|---|---|---|
| Towards Zero | $1 | $1 | $1 | $2 | -$1 |
| Round Down () | $1 | $1 | $1 | $2 | -$2 |
| Round Up () | $2 | $2 | $2 | $3 | -$1 |
| Nearest Even (default) | $1 | $2 | $2 | $2 | -$2 |
Round to EvenIt means, if you have a value that’s less than half way then you round down, if more than half way, round up. When you have something that’s exactly half way, then what you do is round towards the nearest even number.
Closer Look at Round-To-Even
Default Rounding Mode
- Hard to get any other kind without dropping into assembly
- All others are statistically biased
- Sum of set of positive numbers will consistently be over or underestimated
Applying to Other Decimal Places / Bit Positions
- When exactly half way between two possible values
- Round so that least significant digit is even
E.g., round to nearest hundredth:
| Value | Rounded | |
|---|---|---|
| 7.8949999 | 7.89 | Less than half way |
| 7.8950001 | 7.90 | Greater than half way |
| 7.8950000 | 7.90 | Half way (round up) |
| 7.8850000 | 7.88 | Half way (rond down) |
Rounding Binary Numbers
Binary Fractional Numbers
- “Even” when least significant bit is 0
- “Half way” when bits to right of rounding position is
E.g., round to nearest (2 bits right of binary point)
| Value | Binary | Rounded | Action | Rounded Value |
|---|---|---|---|---|
| Less than half way (round down) | ||||
| Greater than half way (round up) | ||||
| Half way (round up) | ||||
| Half way (round down) |
Floating Point Multiplication
- Sign is ^
- Significand is
- Exponent is
Fixing
- If , shift right, increment
- If out of range, overflow
- Round to fit frac precision
Biggest chore in implementation is multiplying significands
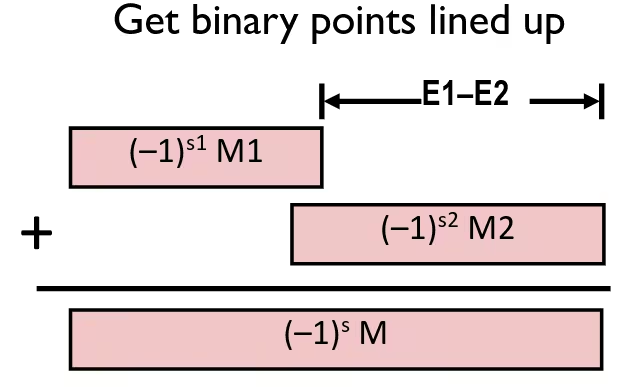
Floating Point Addition
(Assume )
- Sign , significand
- Result of signed align & add
- Exponent
Fixing
- If , shift right, increment
- If , shift left positions, decrement by
- Overflow if out of range
- Round to fit frac precision
Mathematical Properties of Floating Point Add
- Compare to those of Abelian Group
- Closed under addition ? (Yes)
- But may generate infinity or NaN
- Commutative ? (Yes)
- Associative ? (No)
- Overflow and inexactness of rounding
(3.14+1e10)-1e10 = 0, 3.14+(1e10-1e10) = 3.14
- is additive identity ? (Yes)
- Every element has additive inverse ? (Almost)
- Except for infinities & NaNs
- Closed under addition ? (Yes)
- Monotonicity
- ? (Almost)
- Except for infinities & NaNs
- ? (Almost)
Mathematical Properties of Floating Point Mult
- Compare to Commutative Ring
- Closed under multiplication ? (Yes)
- But may generate infinity or NaN
- Multiplication Commutative ? (Yes)
- Multiplication is Associative ? (No)
- Possibility of overflow, inexactness of rounding
(1e20*1e20)*1e-20 = inf, 1e20*(1e20*1e-20) = 1e20
- is multiplicative identity ? (Yes)
- Multiplication distributes over addition ? (No)
- Possibility of overflow, inexactness of rounding
1e20*(1e20-1e20) = 0.0, 1e20*1e20-1e20*1e20 = NaN
- Closed under multiplication ? (Yes)
- Monotonicity
- ? (Almost)
- Except for infinities & NaNs
- ? (Almost)
Floating Point in C
Conversions / Casting
CAUTIONCasting between
int,float, anddoublechanges bit representation!
double/floattoint- Truncates fractional part
- Like rounding toward zero
- Not defined when out of range or : Generally sets to
inttodouble- Exact conversion, as long as
inthas bit word size
- Exact conversion, as long as
inttofloat- Will round according to rounding mode
Machine-Level Programming
History of Intel processors and architectures
Nobody (at least me), can keep these long history in mind! So I’ll just skipping this part to save life~
C, Assembly, Machine Code
Definitions
- Architecture: (also ISA: instruction set architecture) The parts of a processor design that one needs to understand or write assembly/machine code
- Examples: instruction set specification, registers
- Microarchitecture: Implementation of the architecture
- Examples: cache sizes and core frequency
Assembly / Machine Code View

Turning C into Object Code
- Code in files
p1.cp2.c - Compile with command:
gcc -Og p1.c p2.c -o p- Use basic optimizations (
-Og) [New to recent versions of GCC] - Put resulting binary in file
p
- Use basic optimizations (

Assembly Characteristics: Data Types
- “Integer” data of 1, 2, 4 or 8 bytes
- Data values
- Address (untyped pointers)
- Floating Point data of 4, 8 or 10 bytes
- Code: Byte sequences encoding series of instructions
- No aggregate types such as arrays or structures
- Just contiguously allocated bytes in memory
Assembly Characteristics: Operations
- Perform arithmetic function on register or memory data
- Transfer data between memory and register
- Load data from memory into register
- Store register data into memory
- Transfer control
- Conditional branches
- Unconditional jumps to/from procedures
Object Code
- Assembler
- Translates
.sinto.o - Binary encoding of each instruction
- Nearly-complete image of executable code
- Missing linkages between code in different files
- Translates
- Linker
- Resolves references between files
- Combines with static run-time libraries
- E.g., code for
malloc,printf
- E.g., code for
- Some libraries are dynamically linked
- Linking occurs when program begins execution
Assembly Basics: Registers, Operands, Move
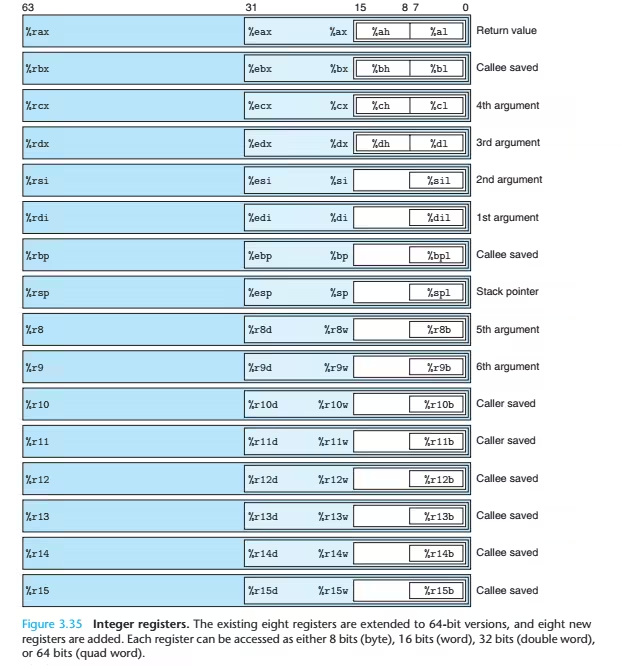
x86‐64 Integer Registers
Moving Data
movq src, dst- Operand Types
- Immediate: Constant integer data
- E.g.,
$0x400,$-533 - Like C constant, but prefixed with
$ - Encoded with 1, 2, or 4 bytes
- E.g.,
- Register: One of 16 integer registers
- E.g.,
%rax,%r13 - But
%rspreserved for special use - Others have special uses for particular instructions
- E.g.,
- Memory: 8 consecutive bytes of memory at address given by register
- Simplest example:
(%rax) - Various other “address modes”
- Simplest example:
- Immediate: Constant integer data

Complete Memory Addressing Modes
D(Rb, Ri, S),Mem[Reg[Rb] + S * Reg[Ri] + D]D: Constant “displacement” 1, 2, or 4 bytesRb: Base register: Any of 16 integer registersRi: Index register: Any, except for%rspS: Scale (1, 2, 4, or 8)
- Special Cases
(Rb, Ri):Mem[Reg[Rb] + Reg[Ri]]D(Rb, Ri):Mem[Reg[Rb] + Reg[Ri] + D](Rb, Ri, S):Mem[Reg[Rb] + S * Reg[Ri]]
Arithmetic & Logical Operations
Address Computation Instruction
leaq src, dstsrcis address mode expression- Set
dstto address denoted by expression
- Uses
- Computing addresses without a memory reference
- E.g., translation of
p = &x[i];
- E.g., translation of
- Computing arithmetic expressions of the form
x + k * ykequals to 1, 2, 4, or 8
- Computing addresses without a memory reference
Here is an example of computing arithmetic expression with leaq:
long m12(long x) { return x * 12;}Converted to ASM by compiler:
leaq (%rdi, %rdi, 2), %rax # t <- x + x * 2salq $2, %rax # return t << 2A bit more complex one:
long arith(long x, long y, long z) { long t1 = x + y; long t2 = z + t1; long t3 = x + 4; long t4 = y * 48; long t5 = t3 + t4; long rval = t2 * t5;
return rval;}arith: leaq (%rdi, %rsi), %rax # t1 addq %rdx, %rax # t2 leaq (%rsi, %rsi, 2), %rdx salq $4, %rdx # t4 leaq 4(%rdi, %rdx), %rcx # t5 imulq $rcx, %rax # rval retControl: Condition Codes
Condition Codes (Implicit Setting)
Think of it as a side effect by arithmetic operations.
leaq won’t effect flags.
Condition Codes (Explicit Setting)
- Compare Instrucion
cmpq src2, src1: computingsrc1 - src2without setting destination
- Test Instruction
testq src2, src1: computingsrc1 & src2without setting destination- Useful to have one of the operands be a mask
Reading Condition Codes
setXInstructions- Set low‐order byte of destination (must one of addressable byte registers) to 0 or 1 based on combinations of condition codes
- Does not alter remaining 7 bytes
- Typically use
movzbl(Move with Zero-Extend from Byte to Long) to finish job- 32‐bit instructions also set upper 32 bits to 0
- Typically use
NOTEAny computation where the result is a 32-bit result, it will zero out the higher 32-bits of the register. And its different for example the byte level operations only affect the bytes, the word operations only affect two bytes.
| setX | Condition | Description |
|---|---|---|
sete | ZF | Equal / Zero |
setne | ~ZF | Not Equal / Not Zero |
sets | SF | Negative |
setns | ~SF | Nonnegative |
setg | ~(SF ^ OF) & ~ZF | Greater (Signed) |
setge | ~(SF ^ OF) | Greater or Equal (Signed) |
setl | (SF ^ OF) | Less (Signed) |
setle | (SF ^ OF) | ZF | Less or Equal (Signed) |
seta | ~CF & ~ZF | Above (Unsigned) |
setb | CF | Below (Unsigned) |
NOTE
sil,dil,spl,bplare all 1 byte registers.
int gt(long x, long y) { return x > y;}cmpq %rsi, %rdi # Compare x:ysetg %al # Set %al to 1 when >movzbl %al, %eax # Zero rest of %raxretConditional Branches
Jumping
jXInstructions- Jump to different part of code depending on condition codes
| jX | Condition | Description |
|---|---|---|
jmp | 1 | Unconditional |
je | ZF | Equal / Zero |
jne | ~ZF | Not Equal / Not Zero |
js | SF | Negative |
jns | ~SF | Nonnegative |
jg | ~(SF ^ OF) & ~ZF | Greater (Signed) |
jge | ~(SF ^ OF) | Greater or Equal (Signed) |
jl | SF ^ OF | Less (Signed) |
jle | (SF ^ OF) | ZF | Less or Equal (Signed) |
ja | ~CF & ~ZF | Above (Unsigned) |
jb | CF | Below (Unsigned) |
Using Conditional Moves
- Conditional Move Instructions
- Instruction supports:
if (Test) Dest <- Src - Supported in post-1995 x86 processors
- GCC tries to use them (but, only when known to be safe)
- Branches are very disruptive to instruction flow through pipelines
- Conditional moves do not require control transfer
- Instruction supports:
Here is a simple example of conditional move:
long absdiff(long x, long y) { long result; if (x > y) result = x - y; else result = y - x; return result;}absdiff: movq %rdi, %rax # x subq %rsi, %rax # result = x - y movq %rsi, %rdx subq %rdi, %rdx # eval = y - x cmpq %rsi, %rdi # x:y cmovle %rdx, %rax # if <=, result = eval retBad Cases for Conditional Move
- Expensive Computations:
val = Test(x) ? Hard1(x) : Hard2(x);- Both values get computed
- Only makes sense when computations are very simple
- Risky Computations:
val = p ? *p : 0;- Both values get computed
- May have undesirable effects
- Computations with side effects:
val = x > 0 ? x *= 7 : x += 3;- Both values get computed
- Must be side-effect free
Loops
IMPORTANTEach kind of loop will convert to their
gotoversion and then assembly code.
”Do-While” Loop
C Code:
long pcount_do(unsigned long x) { long result = 0; do { result += x & 0x1; x >>= 1; } while (x); return result;}Goto Version:
long pcount_goto(unsigned long x) { long result = 0;loop: result += x & 0x1; x >>= 1; if (x) goto loop; return result;}Assembly Code:
movl $0, %eax # result = 0.L2: # loop: movq %rdi, %rdx andl $1, %edx # t = x & 0x1 addq %rdx, %rax # result += t shrq %rdi # x >>= 1 jne .L2 # if (x) goto loop rep; retGeneral “Do-While” Translation
do { Body} while (Test);loop: Body if (Test) goto loop”While” Loop
General “While” Translation 1 (“Jump‐to-middle” translation, compiled with -Og)
while (Test) { Body} goto testloop: Bodytest: if (Test) goto loopdone:General “While” Translation 2 (Compiled with -O1)
while (Test) { Body}To Do-While Version:
if (!Test) goto done; do { Body } while (Test);done:Goto Version:
if (!Test) goto done;loop: Body if (Test) goto loop;done:The initial conditional guards entrance to loop.
”For” Loop
”For” Loop “While” Conversion
For Version:
for (Init; Test; Update) BodyWhile Version:
Init;while (Test) { Body Update;}“For” Loop “Do-While” Conversion

Initial test can be optimized away.
Switch Statements
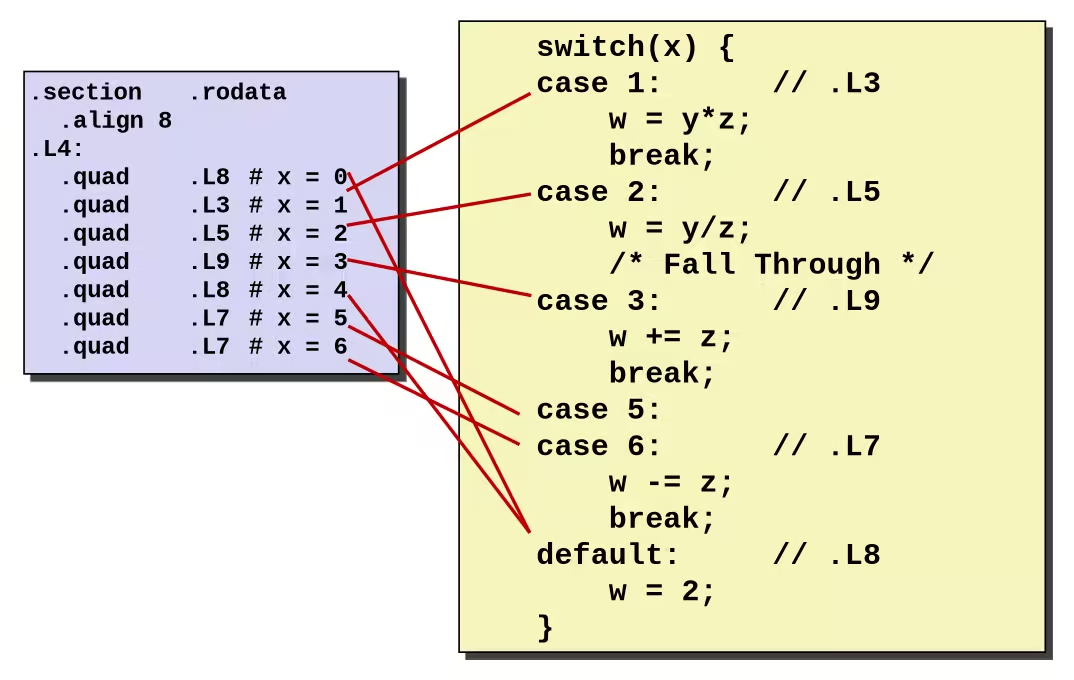
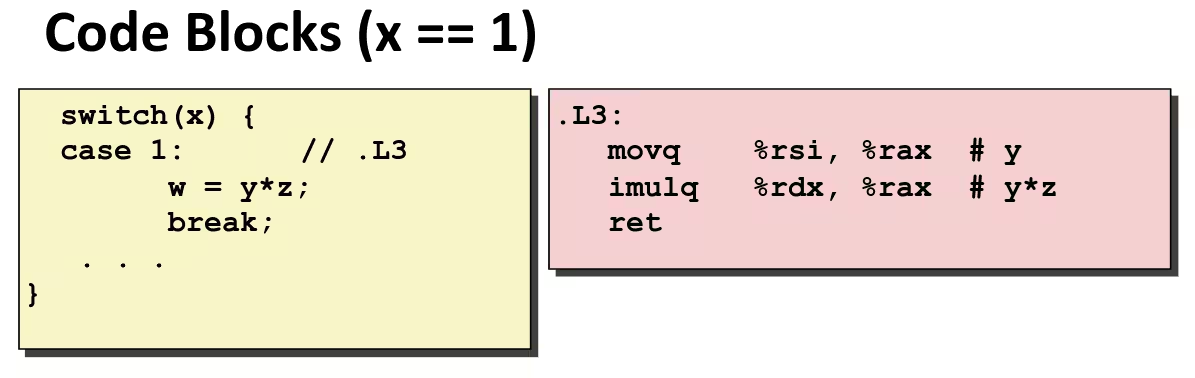
Switch Statement Example
long switch_eg(long x, long y, long z) { long w = 1; switch (x) { case 1: w = y * z; break; case 2: w = y / z; /* Fall Through */ case 3: w += z; break; case 5: case 6: w -= z; break; default: w = 2; } return w;}- Multiple case labels: 5 & 6
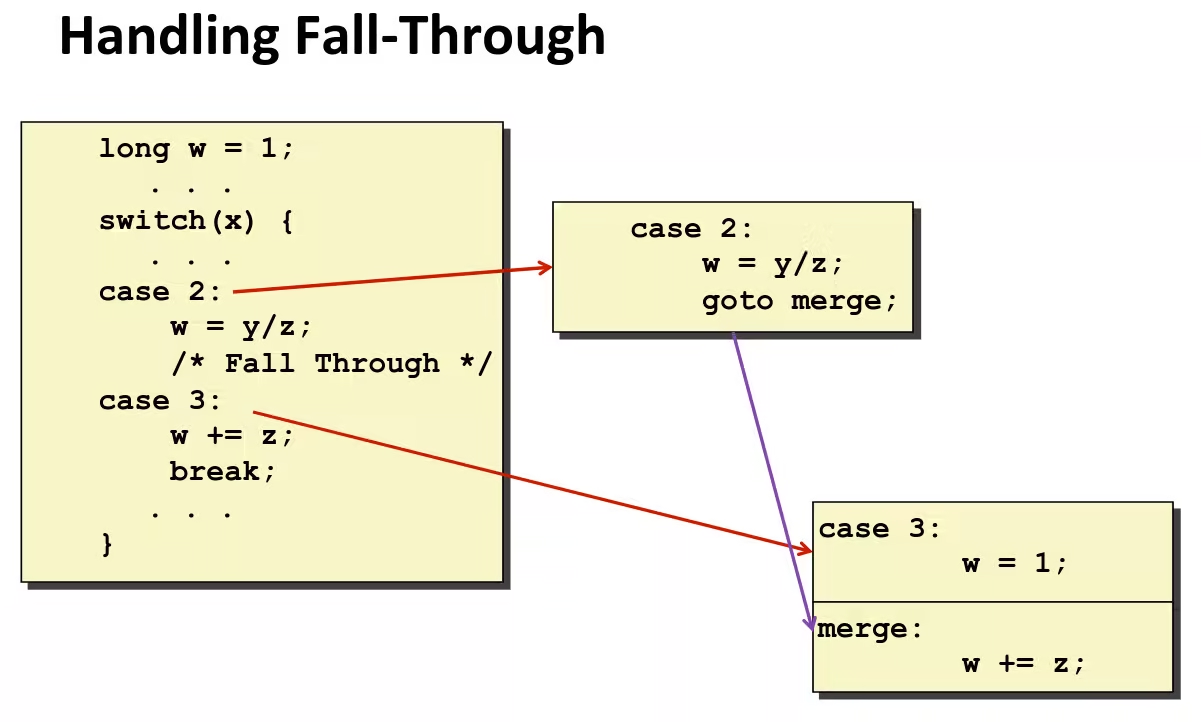
- Fall through cases: 2
- Missing cases: 4
Switch Statement Example in Assembly
switch_eg: movq %rdx, %rcx cmpq $6, %rdi # x:6 ja .L8 # use default jmp *.L4(, %rdi, 8) # goto *JTab[x]Note that w not initialized here.
TIP
ja .L8considering the result is unsigned, so its a smart way to tackle negative number.
Jump Table Structure

Jump Table
.section .rodata .align 8.L4: .quad .L8 # x = 0 .quad .L3 # x = 1 .quad .L5 # x = 2 .quad .L9 # x = 3 .quad .L8 # x = 4 .quad .L7 # x = 5 .quad .L7 # x = 6- Table Structure
- Each target requires 8 bytes
- Base address at
.L4
- Jumping
- Direct:
jmp .L8- Jump target is denoted by label
.L8
- Jump target is denoted by label
- Indirect:
jmp *.L4(, %rdi, 8)- Start of jump table:
.L4 - Must scale by factor of 8 (addresses are 8 bytes)
- Fetch target from effective address
.L4 + %rdi * 8- Only for
0 <= x <= 6
- Only for
- Start of jump table:
- Direct:


Procedures
Stack Structure
x86-64 Stack
- Region of memory managed with stack discipline
- Grows toward lower addresses
- Register
%rspcontains lowest stack address- address of “top” element

Push
pushq src- Fetch operand at
src - Decrement
%rspby 8 - Write operand at address given by
%rsp
- Fetch operand at
Pop
popq dest- Read value at address given by
%rsp - Increment
%rspby 8 - Store value at
dest(must be register)
- Read value at address given by
Calling Conventions
Procedure Control Flow
- Use stack to support procedure call and return
- Procedure call:
call label- Push return address (address of the next instruction right after call) on stack
- Jump to label
- Procedure return:
ret- Pop address from stack
- Jump to address
Managing local data
- First 6 arguments are passing by registers:
%rdi,%rsi,%rdx,%rcx,%r8,%r9, other more arguments will store in stack - Only allocate stack space when needed
- Return value store in
%rax
Stack Frames
- Contents
- Return information
- Local storage (if needed)
- Temporary space (if needed)
- Management
- Space allocated when enter procedure
- “Set-up” code
- Includes push by
callinstruction
- Deallocated when return
- “Finish” code
- Includes pop by
retinstruction
- Space allocated when enter procedure

x86-64 / Linux Stack Frame
-
Current Stack Frame (“Top” to Bottom)
- Argument build: Parameters for function about to call
-
Local variables
- If can’t keep in registers
-
Saved register context
-
Old frame pointer (optional)
-
Caller Stack Frame
- Return address
- Arguments for this call
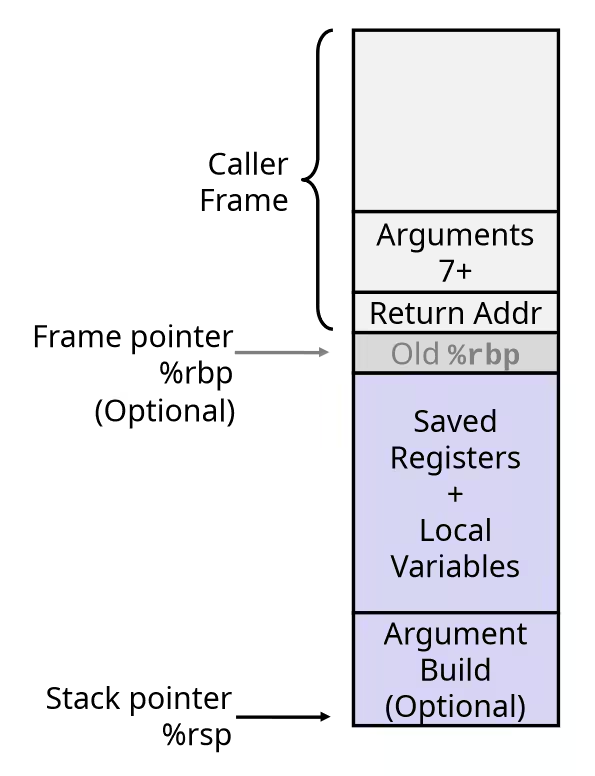
NOTEAs we often see the program often allocates more space on the stack than it really needs to, its because some conventions about trying to keep addresses on aligned.
Register Saving Conventions
- Caller Saved
- Caller saves temporary values in its frame before the call
- Callee Saved
- Callee saves temporary values in its frame before using
- Callee restores them before returning to caller
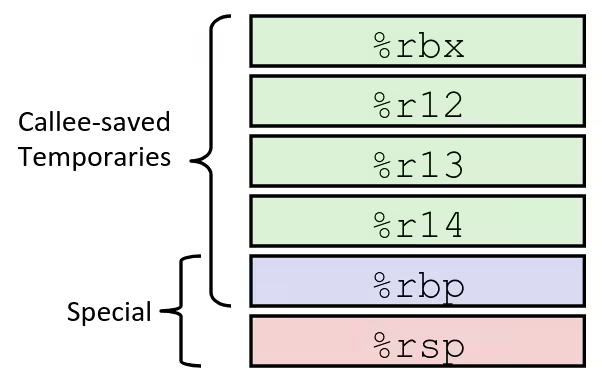
x86-64 Linux Register Usage 1
%rax- Return value
- Also caller-saved
- Can be modified by procedure
%rdi,%rsi,%rdx,%rcx,%r8,%r9- Arguments
- Also caller-saved
- Can be modified by procedure
%r10,%r11- Caller-saved
- Can be modified by procedure

x86-64 Linux Register Usage 2
%rbx,%r12,%r13,%r14- Callee-saved
- Callee must save & restore
%rbp- Callee-saved
- Callee must save & restore
- May be used as frame pointer
- Can mix & match
%rsp- Special form of callee save
- Restored to original value upon exit from procedure
Recursion Example
long pcount_r(unsigned long x) { if (x == 0) return 0; else: return (x & 1) + pcount_r(x >> 1);}pcount_r: movl $0, %eax testq %rdi, %rdi je .L6 pushq %rbx movq %rdi, %rbx andl $1, %ebx shrq %rdi call pcount_r addq %rbx, %rax popq %rbx.L6: rep; ret- Handled Without Special Consideration (just using normal calling conventions)
- Stack frames mean that each function call has private storage
- Saved registers & local variables
- Saved return pointer
- Register saving conventions prevent one function call from corrupting another’s data
- Unless the C code explicitly does so
- Stack discipline follows call / return pattern
- If P calls Q, then Q returns before P
- Last-In, First-Out
- Stack frames mean that each function call has private storage
- Also works for mutual recursion
- P calls Q; Q calls P
Arrays
One-dimensional Array
Array Allocation
T A[L];- Array of data type
Tand lengthL - Contiguously allocated region of
L * sizeof(T)bytes in memory
- Array of data type
Array Access
T A[L];- Array of data type
Tand lengthL - Identifier
Acan be used as a pointer to array element 0: TypeT *
- Array of data type
Array Accessing Example
#define ZLEN 5
typedef int zip_dig[ZLEN];
int get_digit(zip_dig z, int digit) { return z[digit];}movl (%rdi, %rsi, 4), %eax # z[digit]- Register
%rdicontains starting address of array - Register
%rsicontains array index - Desired digit at
%rdi + 4 * %rsi
Array Loop Example
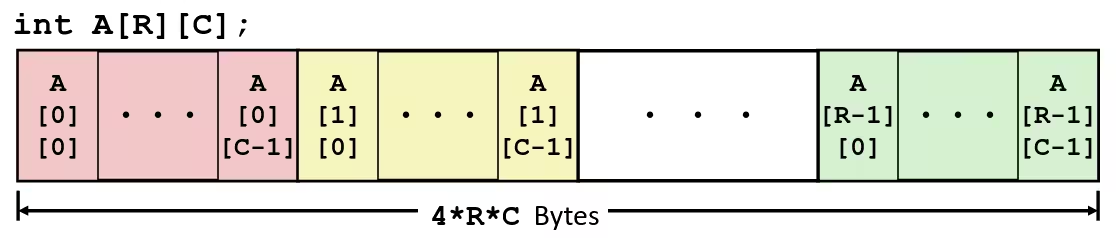
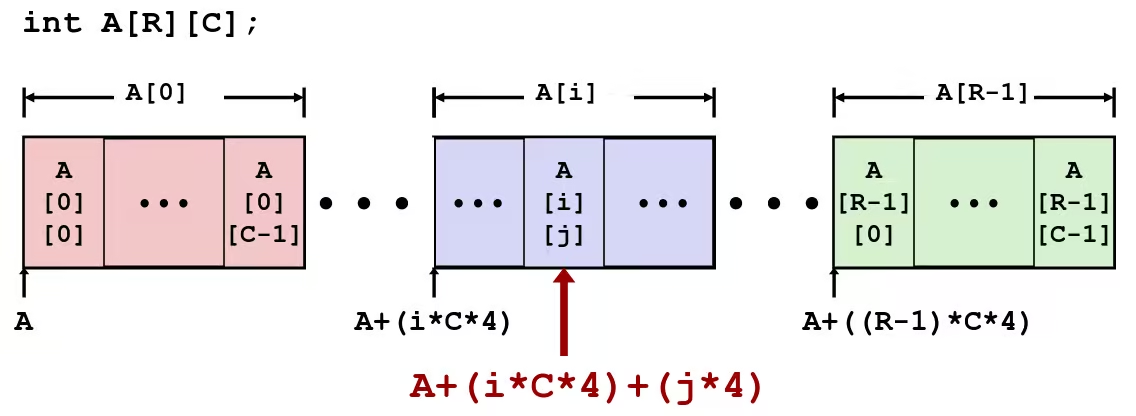
void zincr(zip_dig z) { size_t i; for (i = 0; i < ZLEN; i++) { z[i]++; }} movl $0, %eax # i = 0 jmp .L3 # goto middle.L4: # loop: addl $1, (%rdi, %rax, 4) # z[i]++ addq $1, %rax # i++.L3: # middle cmpq $4, %rax # i:4 jbe .L4 # if <=, goto loop rep; retMultidimensional (Nested) Arrays
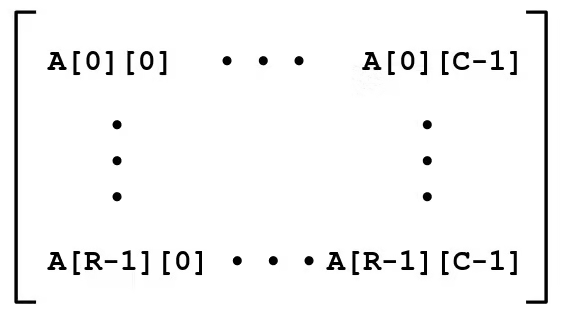
T A[R][C]- 2D array of data type
T Rrows,Ccolumns- Type
Telement requiresKbytes
- 2D array of data type
- Array Size
R * C * Kbytes
- Arrangement
- Row-Major Ordering
Nested Array Example
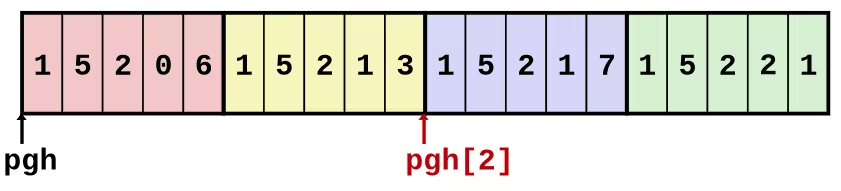
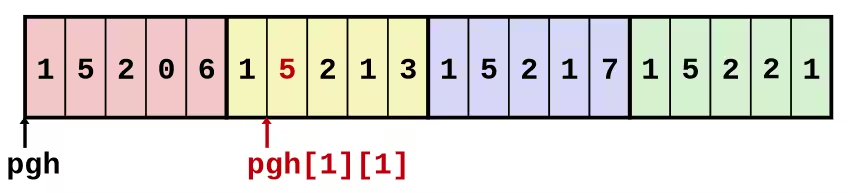
#define ZLEN 5#define PCOUNT 4
typedef int zip_dig[ZLEN];
zip_dig pgh[PCOUNT] = { {1, 5, 2, 0, 6}, {1, 5, 2, 1, 3}, {1, 5, 2, 1, 7}, {1, 5, 2, 2, 1}}zip_dig pgh[4] is equivalent to int pgh[4][5].

Nested Array Row Access
- Row Vectors
A[i]is array ofCelements- Each element of type
TrequiresKbytes - Starting address
A + i*(C*K)

Nested Array Row Access Example
int *get_pgh_zip(int index) { return pgh[index];}leaq (%rdi, %rdi, 4), %rax # 5*indexleaq pgh(, %rax, 4), %rax # pgh + (20*index)- Row Vector
pgh[index]is array of 5int’s- Starting address
pgh + 20*index
- Machine Code
- Computes and returns address
- Compute as
pgh + 4*(index + 4*index)
Nested Array Element Access Example
- Array Elements
A[i][j]is element of typeT, which requiresKbytes- Address
A + i*(C*K) + j*K = A + (i*C + j)*K
Nested Array Element Access Example
int get_pgh_digit(int index, int dig) { return pgh[index][dig];}leaq (%rdi, %rdi, 4), %rax # 5*indexaddl %rax, %rsi # 5*index + digmovl pgh(, %rsi, 4), %eax # M[pgh + 4*(5*index + dig)]- Array Elements
pgh[index][dig]isint- Address:
Mem[pgh + 20*index + 4*dig] = Mem[pgh + 4*(5*index + dig)]
Multi-Level Array
zip_dig cmu = {1, 5, 2, 1, 3};zip_dig mit = {0, 2, 1, 3, 9};zip_dig ucb = {9, 4, 7, 2, 0};
#define UCOUNT 3
int *univ[UCOUNT] = {mit, cmu, ucb};- Variable
univdenotes array of 3 elements - Each element is a pointer (8 bytes)
- Each pointer points to array of
int’s
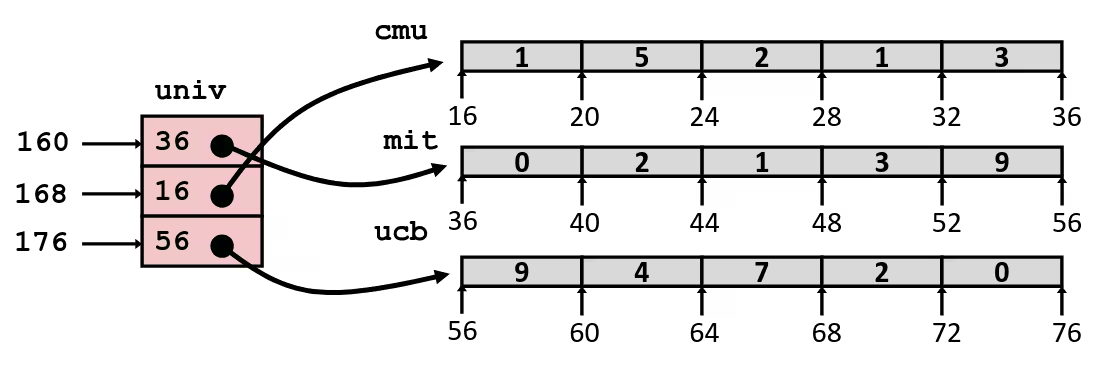
Element Access in Multi-Level Array
int get_univ_digit(size_t index, size_t digit) { return univ[index][digit];}salq $2, %rsi # 4*digitaddq univ(, %rdi, 8), %rsi # p = univ[index] + 4*digitmovl (%rsi), %eax # return *pret- Element access
Mem[Mem[univ + 8*index] + 4*digit] - Must do two memory reads
- First get pointer to row array
- Then access element within array
N x N Matrix
- Fixed dimensions
- Know value of
Nat compile time
- Know value of
#define N 16
typedef int fix_matrix[N][N];
/* Get element A[i][j] */int fix_ele(fix_matrix A, size_t i, size_t j) { return A[i][j];}- Variable dimensions, explicit indexing
- Traditional way to implement dynamic arrays
#define IDX(n, i, j) ((i)*(n)+(j))
/* Get element A[i][j] */int vec_ele(size_t n, int *A, size_t i, size_t j) { return A[IDX(n,i,j)];}- Variable dimensions, explicit indexing
- Now supported by gcc
/* Get element A[i][j] */int var_ele(size_t n, int A[n][n], size_t i, size_t j) { return A[i][j];}N x N Matrix Access
- Array Elements
size_t n;int A[n][n];- Address
A + i*(C*K) + j*K C = n, K = 4- Must perform integer multiplication
/* Get element A[i][j] */int var_ele(size_t n, int A[n][n], size_t i, size_t j) { return A[i][j];}imulq %rdx, %rdi # n*ileaq (%rsi, %rdi, 4), %rax # A + 4*n*imovl (%rax, %rcx, 4), %eax # A + 4*n*i + 4*jretUnderstanding Pointers & Array
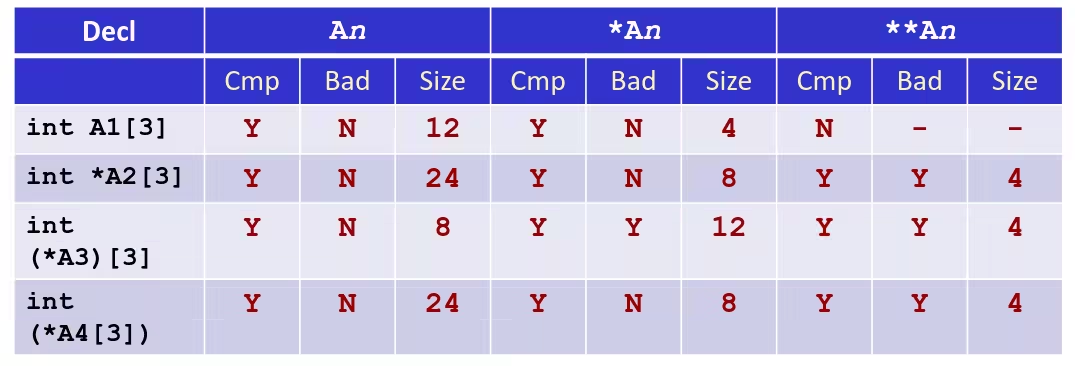
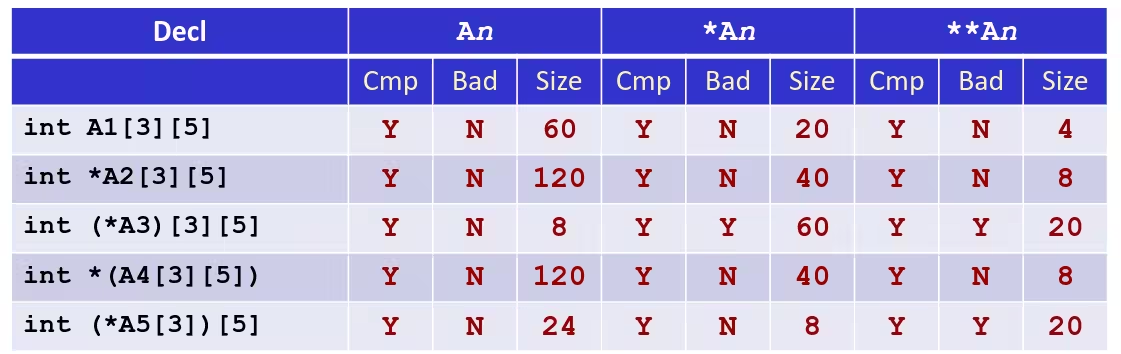
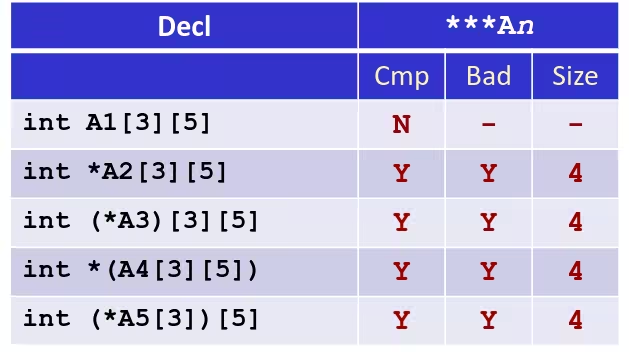
- Cmp: Compiles (Y/N)
- Bad: Possible bad pointer reference (Y/N)
- Size: Value returned by
sizeof
Structures
Allocation
- Structure represented as block of memory
- Big enough to hold all of the fields
- Fields ordered according to declaration
- Even if another ordering could yield a more compact representation
- Compiler determines overall size + positions of fields
- Machine-level program has no understanding of the structures in the source code
Access
Generating Pointer to Structure Member
struct rec { int a[4]; size_t i; struct rec *next;};
int *get_ap(struct rec *r, size_t idx) { return &r->a[idx];}leaq (%rdi, %rsi, 4), %raxret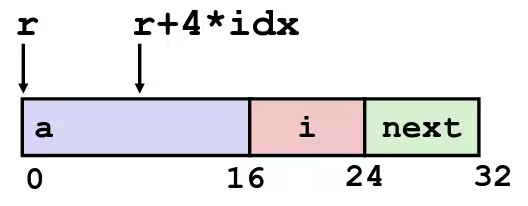
- Offset of each structure member determined at compile time
- Compute as
r + 4*idx
Following Linked List
struct rec { int a[4]; int i; struct rec *next;};
void set_val(struct rec *r, int val) { while (r) { int i = r->i; r->a[i] = val; r = r->next; }}.L11: # loop: movslq 16(%rdi), %rax # i = M[r + 16] movl %esi, (%rdi, %rax, 4) # M[r + 4*i] = val movq 24(%rdi), %rdi # r = M[r + 24] testq %rdi, %rdi # Test r jne .L11 # if != 0 goto loop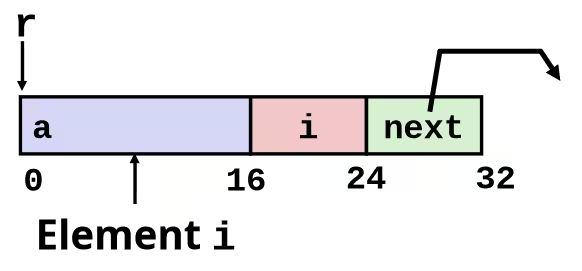
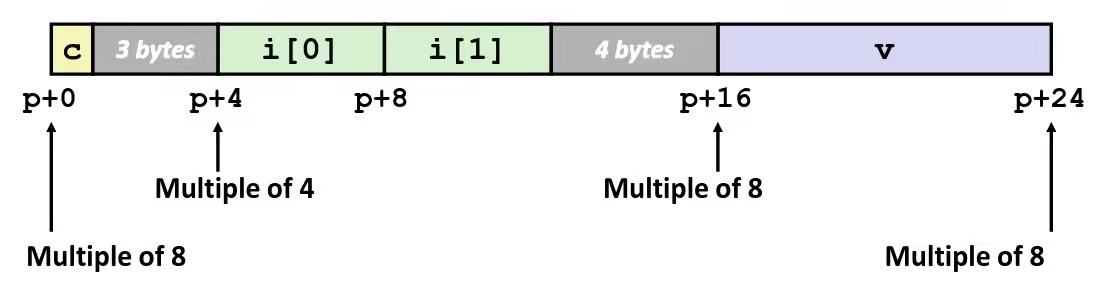
Alignment
struct S1 { char c; int i[2]; double v;} *p;- Unaligned Data

- Aligned Data
- Primitive data type requires
Kbytes - Address must be multiple of
K - Required on some machines; advised on x86-64
- Primitive data type requires
-
Motivation for Aligning Data
- Memory accessed by (aligned) chunks of 4 or 8 bytes (system dependent)
- Inefficient to load or store datum that spans quad word boundaries
- Virtual memory trickier when datum spans 2 pages
- Memory accessed by (aligned) chunks of 4 or 8 bytes (system dependent)
-
Compiler
- Inserts gaps in structure to ensure correct alignment of fields
Specific Cases of Alignment (x86-64)
- 1 byte:
char, …- no restrictions on address
- 2 bytes:
short, …- lowest 1 bit of address must be
- 4 bytes:
int,float, …- lowest 2 bits of address must be
- 8 bytes:
double,long,char *, …- lowest 3 bits of address must be
IMPORTANTIf an address requires alignment to bytes, then its lowest bits must be .
Satisfying Alignment with Structures
-
Within structure
- Must satisfy each element’s alignment requirement
-
Overall structure placement
- Each structure has alignment requirement
KKis largest alignment of any element
- Initial address & structure length must be multiples of
K
- Each structure has alignment requirement
-
Example
struct S2 { double v; int i[2]; char c;} *p;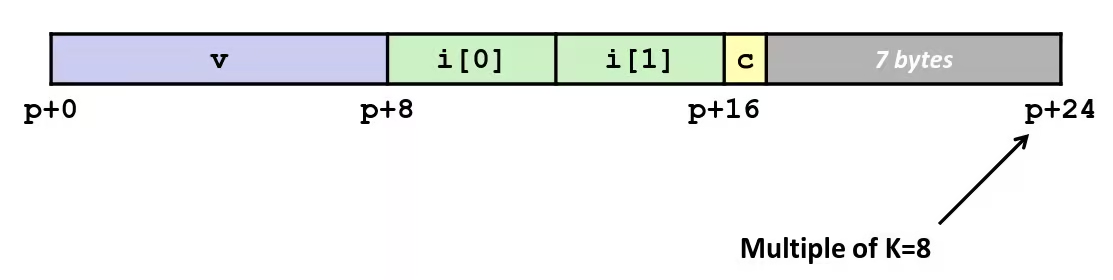
Arrays of Structures
- Overall structure length multiple of
K - Satisfy alignment requirement for every element
struct S2 { double v; int i[2]; char c;} a[10];
Accessing Array Elements
- Compute array offset
12*idxsizeof(S3), including alignment spacers
- Element
jis at offset 8 within structure - Assembler gives offset
a+8- Resolved during linking
struct S3 { short i; float v; short j;} a[10];
short get_j(int idx) { return a[idx].j;}leaq (%rdi, %rdi, 2), %rax # 3*idxmovzwl a+8(, %rax, 4), %eaxSaving Space
- Put large data types first
struct S4 { char c; int i; char d;} *p;struct S5 { int i; char c; char d;} *p;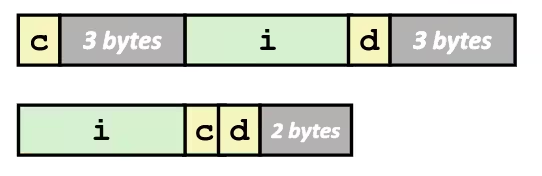
Floating Point
x87 FP
- Legacy, very ugly
SSE3 FP
XMM Registers
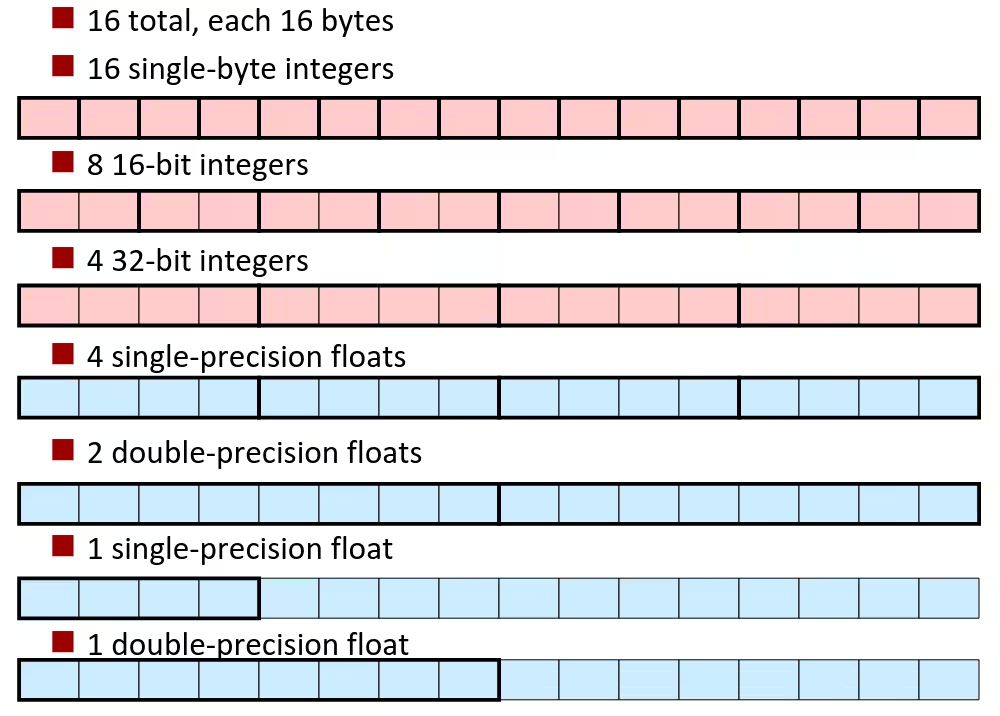
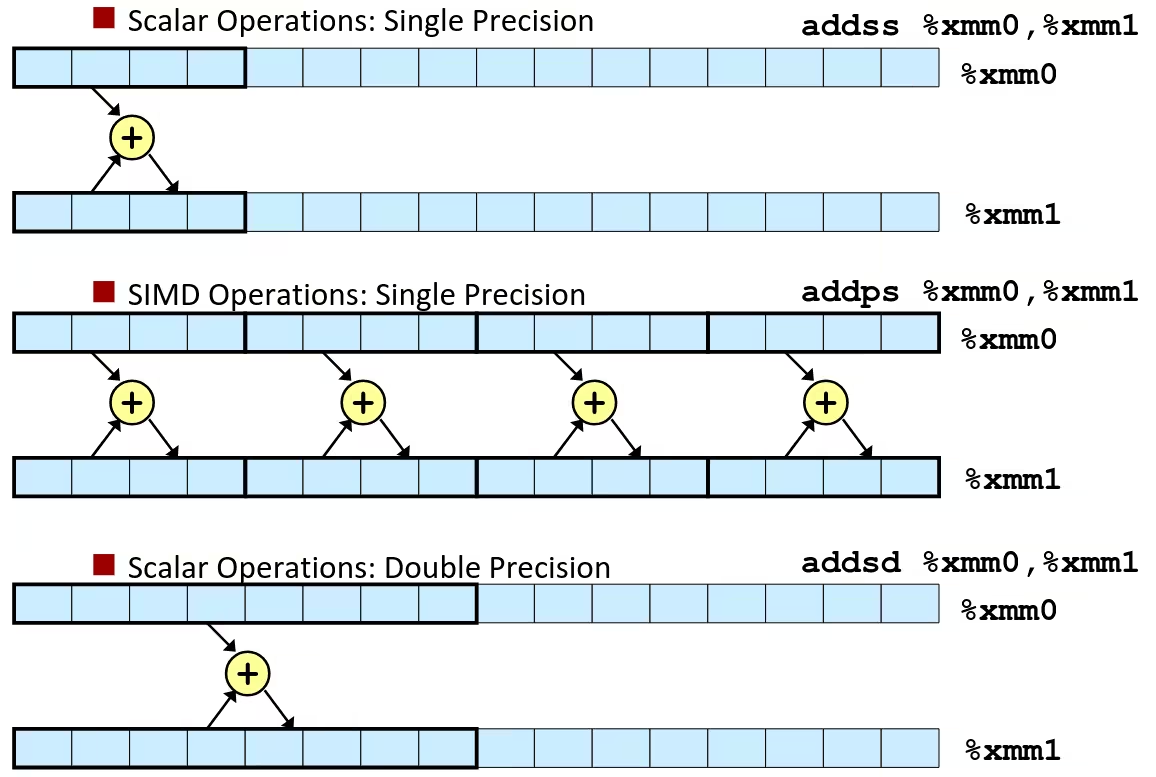
Scalar & SIMD Operations
SIMD (Single instruction, multiple data), there are a ton of usage combinations, e.g.:
addss (ADD Scalar Single-Precision Floating-Point Values)addps (ADD Packed Single-Precision Floating-Point Values)
Basics
- Arguments passed in
%xmm0,%xmm1, … - Result returned in
%xmm0 - All
XMMregisters caller-saved
float fadd(float x, float y) { return x + y;}addss %xmm1, %xmm0retdouble dadd(double x, double y) { return x + y;}addsd %xmm1, %xmm0retMemory Referencing
- Integer (and pointer) arguments passed in regular registers
- Floating Point values passed in
XMMregisters - Different
movinstructions to move betweenXMMregisters, and between memory andXMMregisters
double dincr(double *p, double v) { double x = *p; *p = x + v; return x;}movapd %xmm0, %xmm1 # Copy vmovsd (%rdi), %xmm0 # x = *paddsd %xmm0, %xmm1 # t = x + vmovsd %xmm1, (%rdi) # *p = tretmovapd (Move Aligned Packed Double-Precision Floating-Point Values)
Other Aspects of Floating Point Instructions
- Lots of instructions
- Different operations, different formats, …
- Floating-point comparisons
- Instructions
ucomiss (Unordered Compare Scalar Single-Precision)anducomisd (Unordered Compare Scalar Double-Precision) - Set condition codes
CF,ZF, andPF
- Instructions
- Using constant values
- Set
XMM0register to 0 with instructionxorpd %xmm0, %xmm0 - Others loaded from memory
- Set
AVX FP
- Newest version
- Similar to SSE
Floating Point assembly instruction sets are very nasty, though it’s principle thought is simple. So I am just skipping this chapter as TODO. Bro really don’t want learn this chapter…
Memory Layout
x86-64 Linux Memory Layout
- Stack
- Runtime stack (8MB limit, check by
limitcommand) - E.g., local variables
- Runtime stack (8MB limit, check by
- Heap
- Dynamically allocated as needed
- When call
malloc(),calloc(),new()
- Data
- Statically allocated data
- E.g., global vars,
staticvars, string constants
- Text / Shared Libraries
- Executable machine instructions
- Read-only
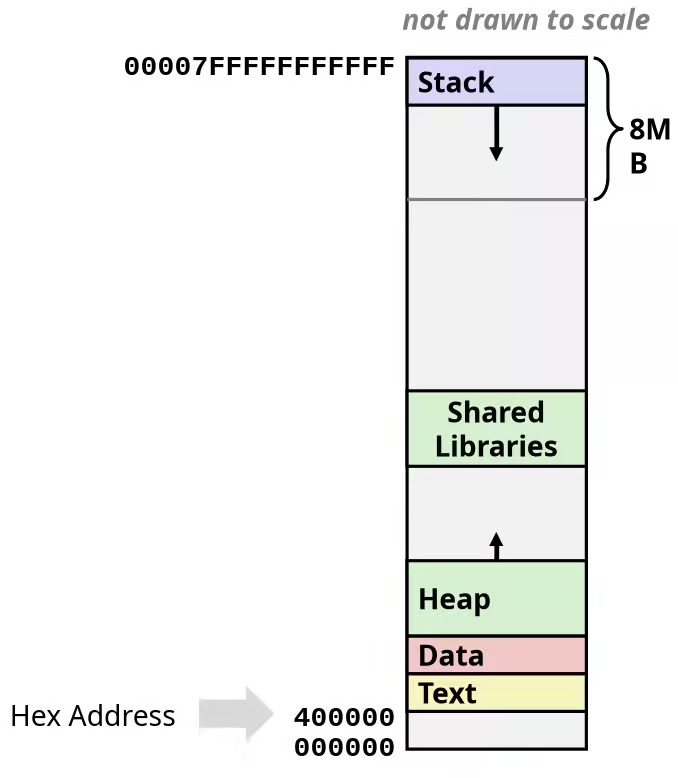
TIPIn common, the canonical address range in x86-64 is 47 bits address. That is why the maximum address show as
0x00007FFFFFFFFFFF.
Unions
Allocation
- Allocate according to largest element
- Can only use one field at a time
union U1 { char c; int i[2]; double v;} *up;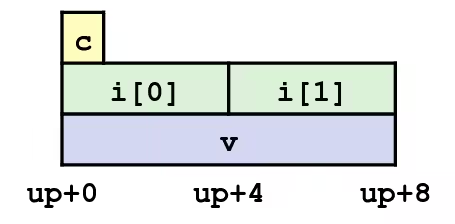
struct S1 { char c; int i[2]; double v;} *sp;
Program Optimization
-
There’s more to performance than asymptotic complexity
-
Must optimize at multiple levels: algorithm, data representations, procedures, and loops
Optimizing Compilers
- Provide efficient mapping of program to machine
- register allocation
- code selection and ordering (scheduling)
- dead code elimination
- eliminating minor inefficiencies
- Don’t (usually) improve asymptotic efficiency
- up to programmer to select best overall algorithm
- Big-O savings are (often) more important than constant factors
- but constant factors also matter
- Have difficulty overcoming “optimization blockers”
- potential memory aliasing
- potential procedure side-effects
Limitations of Optimizing Compilers
- Operate under fundamental constraint
- Must not cause any change in program behavior
- Except, possibly when program making use of nonstandard language features
- Often prevents it from making optimizations that would only affect behavior under pathological conditions.
- Must not cause any change in program behavior
- Behavior that may be obvious to the programmer can be obfuscated by languages and coding styles
- E.g., Data ranges may be more limited than variable types suggest
- Most analysis is performed only within procedures
- Whole-program analysis is too expensive in most cases
- Newer versions of GCC do interprocedural analysis within individual files
- But, not between code in different files
- Most analysis is based only on static information
- Compiler has difficulty anticipating run-time inputs
- When in doubt, the compiler must be conservative
Generally Useful Optimizations
Optimizations that you or the compiler should do regardless of processor / compiler
- Code Motion
- Reduce frequency with which computation performed
- If it will always produce same result
- Especially moving code out of loop
- Reduce frequency with which computation performed
void set_row(double *a, double *b, long i, long n) { long j; for (j = 0; j < n; j++) a[n*i+j] = b[j];}void set_row(double *a, double *b, long i, long n) { long j; int ni = n*i; for (j = 0; j < n; j++) a[ni+j] = b[j];}Compiler-Generated Code Motion (-O1)
void set_row(double *a, double *b, long i, long n) { long j; for (j = 0; j < n; j++) a[n*i+j] = b[j];}set_row: testq %rcx, %rcx # Test n jle .L1 # If 0, goto done imulq %rcx, %rdx # ni = n*i leaq (%rdi , %rdx, 8), %rdx # rowp = A + ni*8 movl $0, %eax # j = 0.L3: # loop: movsd (%rsi, %rax, 8), %xmm0 # t = b[j] movsd %xmm0, (%rdx, %rax, 8) # M[A + ni*8 + j*8] = t addq $1, %rax # j++ cmpq %rcx, %rax # j:n jne .L3 # if !=, goto loop.L1: # done: rep ; retTo the C code:
void set_row(double *a, double *b, long i, long n) { long j; long ni = n*i; double *rowp = a+ni; for (j = 0; j < n; j++) *rowp++ = b[j];}Reduction in Strength
- Replace costly operation with simpler one
- Shift, add instead of multiply or divide
- Utility machine dependent
- Depends on cost of multiply or divide instruction
- Recognize sequence of products
for (i = 0; i < n; i++) { int ni = n*i; for (j = 0; j < n; j++) a[ni + j] = b[j];}int ni = 0;for (i = 0; i < n; i++) { for (j = 0; j < n; j++) a[ni + j] = b[j]; ni += n;}Share Common Subexpressions
- Reuse portions of expressions
- GCC will do this with
–O1
up = val[(i-1)*n + j ];down = val[(i+1)*n + j ];left = val[i*n + j-1];right = val[i*n + j+1];sum = up + down + left + right;leaq 1(%rsi), %rax # i+1leaq -1(%rsi), %r8 # i-1imulq %rcx, %rsi # i*nimulq %rcx, %rax # (i+1)*nimulq %rcx, %r8 # (i-1)*naddq %rdx, %rsi # i*n+jaddq %rdx, %rax # (i+1)*n+jaddq %rdx, %r8 # (i-1)*n+j- 3 multiplications:
i*n,(i–1)*n,(i+1)*n
long inj = i*n + j;up = val[inj - n];down = val[inj + n];left = val[inj - 1];right = val[inj + 1];sum = up + down + left + right;imulq %rcx, %rsi # i*naddq %rdx, %rsi # i*n+jmovq %rsi, %rax # i*n+jsubq %rcx, %rax # i*n+j-nleaq (%rsi, %rcx), %rcx # i*n+j+n- 1 multiplication:
i*n
Optimization Blockers
NOTEI’m just skipping this chapter, so the notes are seems disordered. Will retake this chapter later.
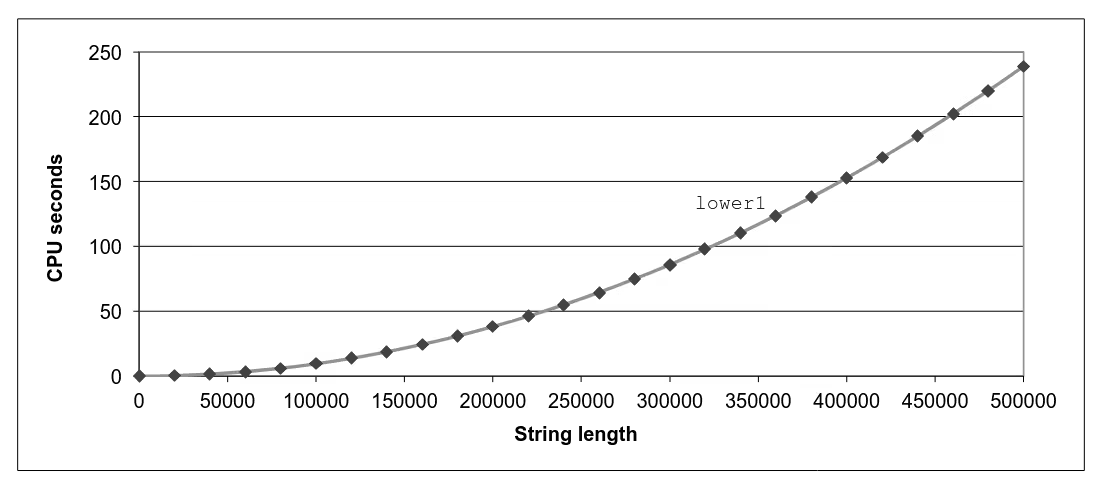
Optimization Blocker: Procedure Calls
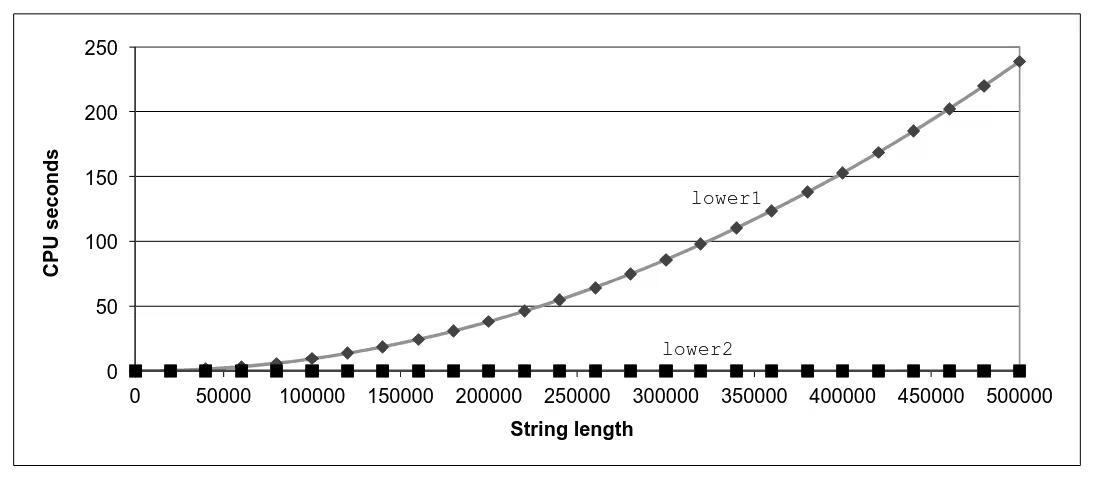
void lower(char *s) { size_t i; for (i = 0; i < strlen(s); i++) if (s[i] >= 'A' && s[i] <= 'Z') s[i] -= ('A' - 'a');}strlenexecuted every iteration- Time quadruples when double string length
- Quadratic performance
Calling strlen
/* My version of strlen */size_t strlen(const char *s) { size_t length = 0; while (*s != '\0') { s++; length++; } return length;}- strlen performance
- Only way to determine length of string is to scan its entire length, looking for null character
- Overall performance, string of length N
- N calls to strlen
- Require times
N,N-1,N‐2, …,1 - Overall performance
Improving Performance
void lower(char *s) { size_t i; size_t len = strlen(s); for (i = 0; i < len; i++) if (s[i] >= 'A' && s[i] <= 'Z') s[i] -= ('A' - 'a');}- Move call to
strlenoutside of loop - Since result does not change from one iteration to another
- Form of code motion
Improved Lower Case Conversion Performance
Why couldn’t compiler move strlen out of inner loop ?
- Procedure may have side effects
- Alters global state each time called
- Function may not return same value for given arguments
- Depends on other parts of global state
- Procedure lower could interact with
strlen
- Warning
- Compiler treats procedure call as a black box
- Weak optimizations near them
- Remedies
- Use of inline functions
- GCC does this with
–O1within single file
- GCC does this with
- Do your own code motion
- Use of inline functions
Memory Matters
/* Sum rows is of n X n matrix a and store in vector b */void sum_rows1(double *a, double *b, long n) { long i, j; for (i = 0; i < n; i++) { b[i] = 0; for (j = 0; j < n; j++) b[i] += a[i*n + j]; }}# sum_rows1 inner loop.L4: movsd (%rsi, %rax, 8), %xmm0 # FP load addsd (%rdi), %xmm0 # FP add movsd %xmm0, (%rsi, %rax, 8) # FP store addq $8, %rdi cmpq %rcx, %rdi jne .L4Memory Aliasing
- Code updates
b[i]on every iteration - Must consider possibility that these updates will affect program behavior
Removing Aliasing
/* Sum rows is of n X n matrix a and store in vector b */void sum_rows2(double *a, double *b, long n) { long i, j; for (i = 0; i < n; i++) { double val = 0; for (j = 0; j < n; j++) val += a[i*n + j]; b[i] = val; }}# sum_rows2 inner loop.L10: addsd (%rdi), %xmm0 # FP load + add addq $8, %rdi cmpq %rax, %rdi jne .L10- No need to store intermediate results
Optimization Blocker: Memory Aliasing
- Aliasing
- Two different memory references specify single location
- Easy to have happen in C
- Since allowed to do address arithmetic
- Direct access to storage structures
- Get in habit of introducing local variables
- Accumulating within loops
- Your way of telling compiler not to check for aliasing
Exploiting Instruction‐Level Parallelism
TODO
Dealing with Conditionals
TODO
The Memory Hierarchy
TODO
Cache Memories
TODO
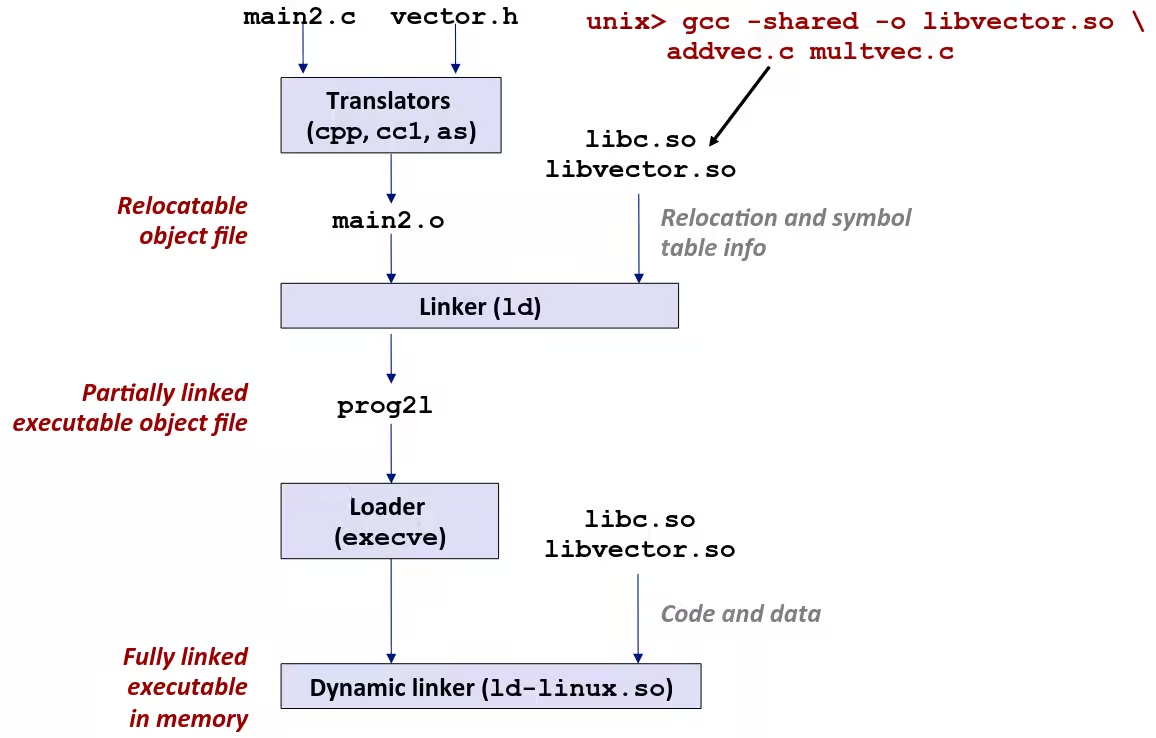
Linking
Static Linking
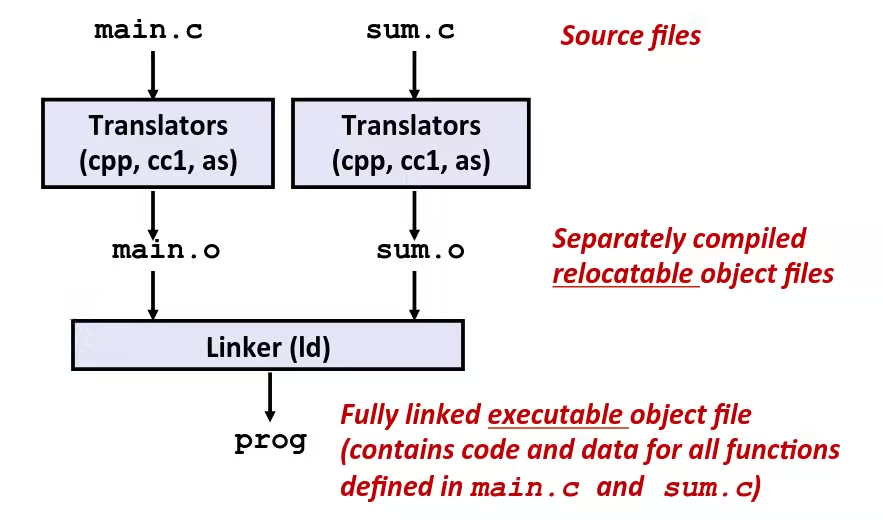
Programs are translated and linked using a compiler driver: gcc -Og -o prog main.c sum.c
Why Linkers ?
- Reason 1: Modularity
- Program can be written as a collection of smaller source files, rather than one monolithic mass
- Can build libraries of common functions
- E.g., Math library, Standard C library
- Reason 2: Efficiency
- Time: Separate compilation
- Change one source file, compile, and then relink
- No need to recompile other source files
- Space: Libraries
- Common functions can be aggregated into a single file
- Yet executable files and running memory images contain only code for the functions they actually use
- Time: Separate compilation
What Do Linkers Do ?
- Step 1: Symbol resolution
- Programs define and reference symbols (global variables and functions)
void swap() { ... } /* define symbol swap */swap(); /* reference symbol swap */int *xp = &x; /* define symbol xp, reference x */
- Symbol definitions are stored in object file (by assembler) in symbol table
- Symbol table is an array of
structs - Each entry includes name, size, and location of symbol
- Symbol table is an array of
- During symbol resolution step, the linker associates each symbol reference with exactly one symbol definition
- Programs define and reference symbols (global variables and functions)
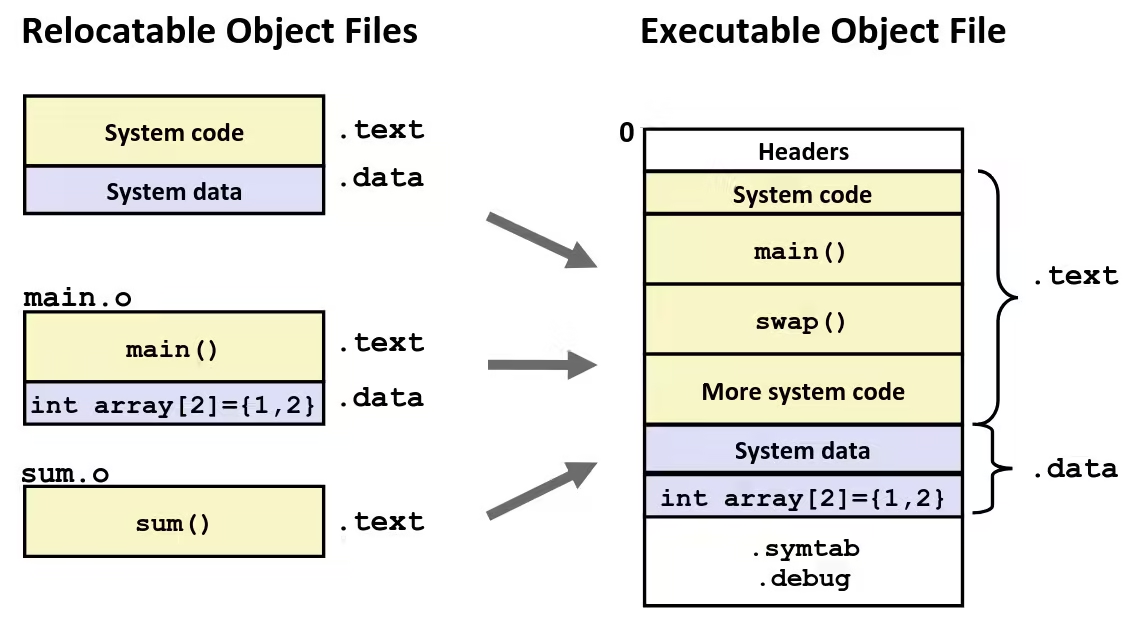
- Step 2: Relocation
- Merges separate code and data sections into single sections
- Relocates symbols from their relative locations in the
.ofiles to their final absolute memory locations in the executable - Updates all references to these symbols to reflect their new positions
Three Kinds of Object Files (Modules)
- Relocatable object file (
.ofile)- Contains code and data in a form that can be combined with other relocatable object files to form executable object file
- Each
.ofile is produced from exactly one source (.c) file
- Each
- Contains code and data in a form that can be combined with other relocatable object files to form executable object file
- Executable object file (
a.outfile)- Contains code and data in a form that can be copied directly into memory and then executed
- Shared object file (
.sofile)- Special type of relocatable object file that can be loaded into memory and linked dynamically, at either load time or run-time
- Called Dynamic Link Libraries (DLLs) by Windows
Executable and Linkable Format (ELF)
- Standard binary format for object files
- One unified format for
- Relocatable object files (
.o) - Executable object files (
a.out) - Shared object files (
.so)
- Relocatable object files (
- Generic name: ELF binaries
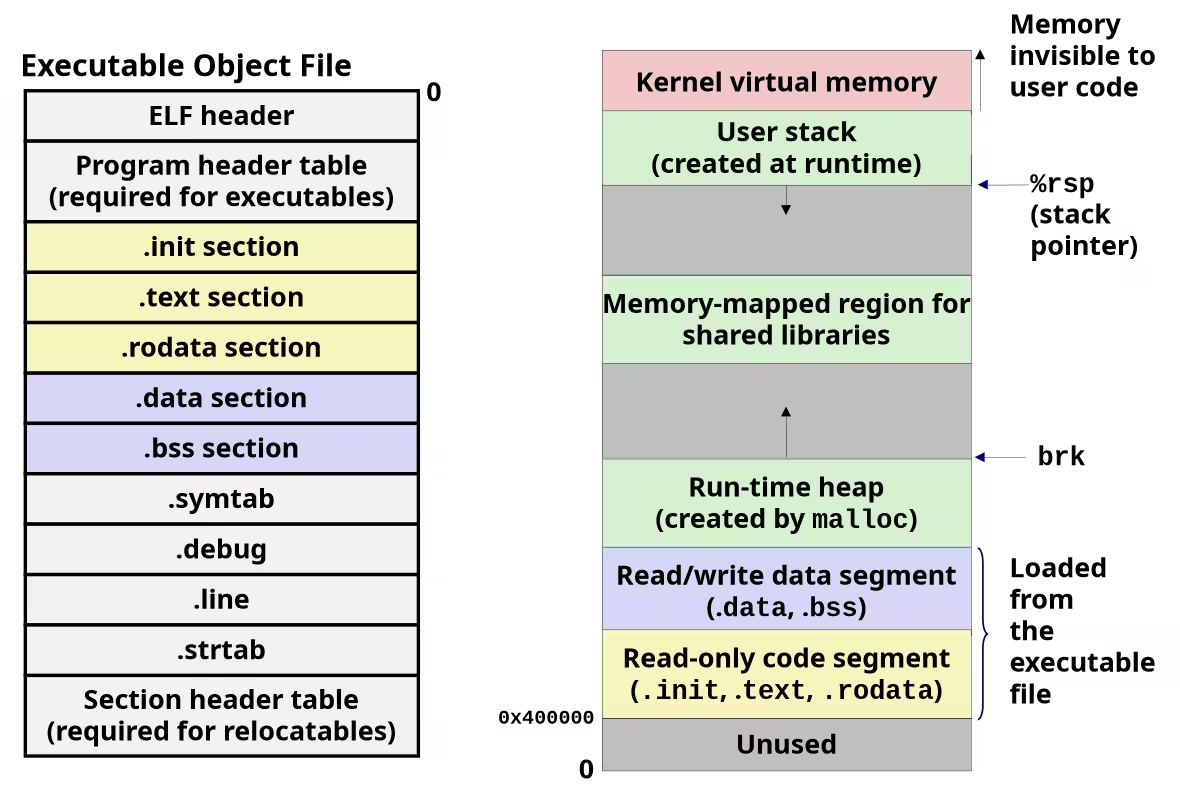
ELF Object File Format
- ELF header
- Word size, byte ordering, file type (
.o,exec,.so), machine type, etc
- Word size, byte ordering, file type (
- Segment header table (required for executables)
- Page size, virtual addresses memory segments (sections), segment sizes
.textsection- Code
.rodatasection- Read only data: jump tables, …
.datasection- Initialized global variables
.bsssection- Global variables that are uninitialized or initialized to zero
- Block Started by Symbol
- “Better Save Space”
- Has section header but occupies no space
.symtabsection- Symbol table
- Procedure and static variable names
- Section names and locations
.rel.textsection- Relocation info for
.textsection - Addresses of instructions that will need to be modified in the executable
- Instructions for modifying
- Relocation info for
.debugsection- Info for symbolic debugging (
gcc -g)
- Info for symbolic debugging (
- Section header table
- Offsets and sizes of each section
Linker Symbols
- Global symbols
- Symbols defined by module m that can be referenced by other modules
- E.g.: non-static C functions and non-static global variables
- External symbols
- Global symbols that are referenced by module m but defined by some other module
- Local symbols
- Symbols that are defined and referenced exclusively by module m
- E.g.: C functions and global variables defined with the static attribute
- Local linker symbols are not local program variables
Local non-static C variables vs. local static C variables
- Local non-static C variables stored on the stack
- Local static C variables stored in either
.bss, or.data
int f() { static int x = 0; /* .bss */ return x;}
int g() { static int x = 1; /* .data */ return x;}In the case above, compiler allocates space in .data for each definition of x and creates local symbols in the symbol table with unique names, e.g., x.1 and x.2.
IMPORTANTLocal static variables are only initialized at first time encountered, calls after won’t reinitialize.
How Linker Resolves Duplicate Symbol Definitions
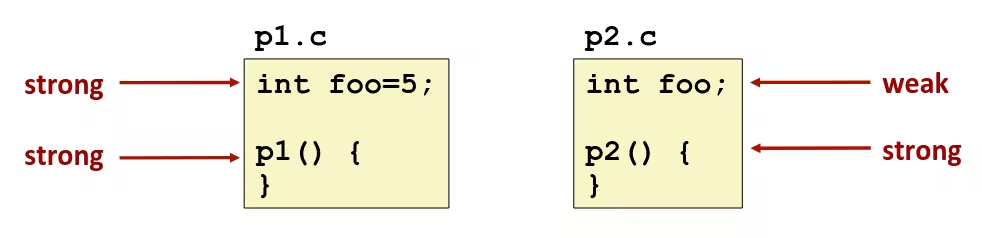
- Program symbols are either
strongorweak- Strong: procedures and initialized globals
- Weak: uninitialized globals
Linker’s Symbol Rules
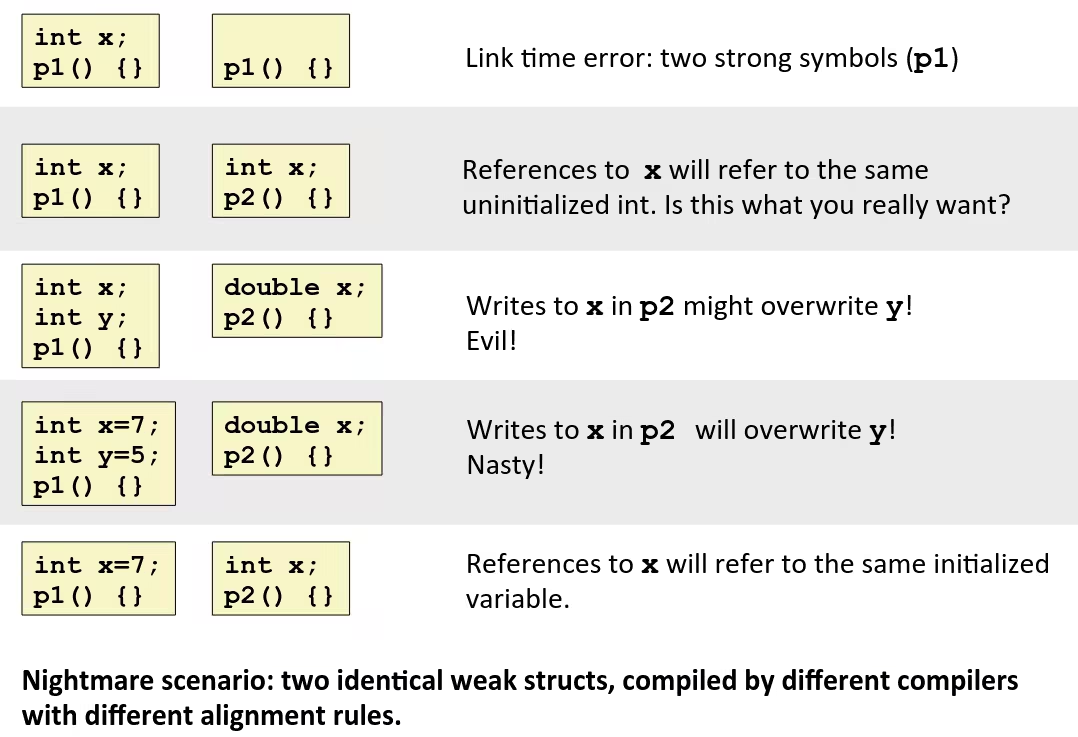
- Rule 1: Multiple strong symbols are not allowed
- Each item can be defined only once
- Otherwise: Linker error
- Rule 2: Given a strong symbol and multiple weak symbols, choose the strong symbol
- References to the weak symbol resolve to the strong symbol
- Rule 3: If there are multiple weak symbols, pick an arbitrary one
- Can override this with
gcc –fno-common
- Can override this with
Global Variables
- Avoid if you can
- Otherwise
- Use
staticif you can - Initialize if you define a global variable
- Use
externif you reference an external global variable
- Use
Relocation
Relocation Entries
int array[2] = {1, 2};
int main() { int val = sum(array, 2); return val;}0000000000000020 <main>: 20: be 02 00 00 00 mov $0x2,%esi 25: 48 8d 3d 00 00 00 00 lea 0x0(%rip),%rdi # 2c <main+0xc> 28: R_X86_64_PC32 array-0x4 2c: e8 00 00 00 00 call 31 <main+0x11> 2d: R_X86_64_PLT32 sum-0x4 31: c3 retRelocated .text section
0000000000001120 <sum>: 1120: ba 00 00 00 00 mov $0x0,%edx 1125: b8 00 00 00 00 mov $0x0,%eax 112a: eb 0d jmp 1139 <sum+0x19> 112c: 0f 1f 40 00 nopl 0x0(%rax) 1130: 48 63 c8 movslq %eax,%rcx 1133: 03 14 8f add (%rdi,%rcx,4),%edx 1136: 83 c0 01 add $0x1,%eax 1139: 39 f0 cmp %esi,%eax 113b: 7c f3 jl 1130 <sum+0x10> 113d: 89 d0 mov %edx,%eax 113f: c3 ret
0000000000001140 <main>: 1140: be 02 00 00 00 mov $0x2,%esi 1145: 48 8d 3d c4 2e 00 00 lea 0x2ec4(%rip),%rdi # 4010 <array> 114c: e8 cf ff ff ff call 1120 <sum> 1151: c3 retUsing PC-relative addressing for sum: 0x1120 = 0x1151 + 0xffffffcf
Loading Executable Object Files
Packaging Commonly Used Functions
- How to package functions commonly used by programmers ?
- Math, I/O, memory management, string manipulation, etc
- Awkward, given the linker framework so far:
- Option 1: Put all functions into a single source file
- Programmers link big object file into their programs
- Space and time inefficient
- Option 2: Put each function in a separate source file
- Programmers explicitly link appropriate binaries into their programs
- More efficient, but burdensome on the programmer
- Option 1: Put all functions into a single source file
Old-fashioned Solution: Static Libraries
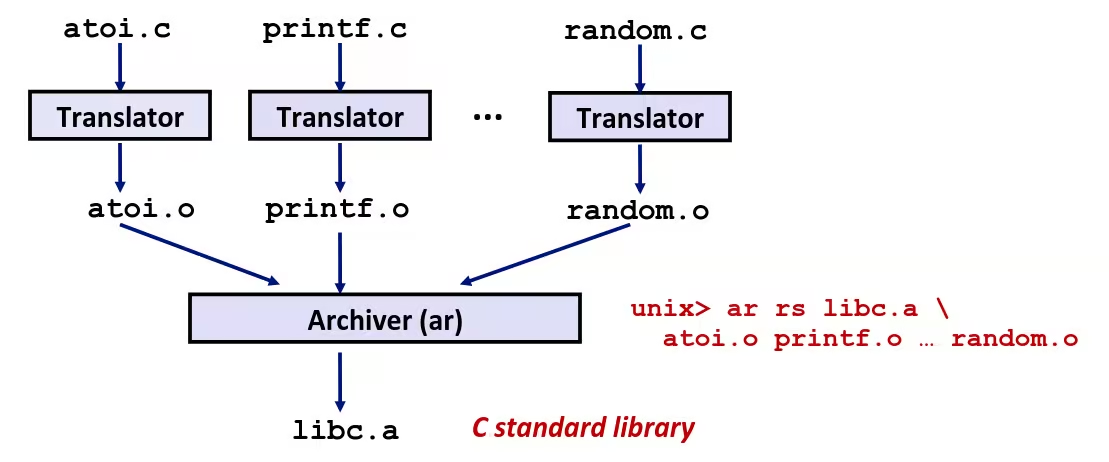
- Static libraries (
.aarchive files)- Concatenate related relocatable object files into a single file with an index (called an archive)
- Enhance linker so that it tries to resolve unresolved external references by looking for the symbols in one or more archives
- If an archive member file resolves reference, link it into the executable
Creating Static Libraries
- Archiver allows incremental updates
- Recompile function that changes and replace
.ofile in archive
Linking with Static Libraries
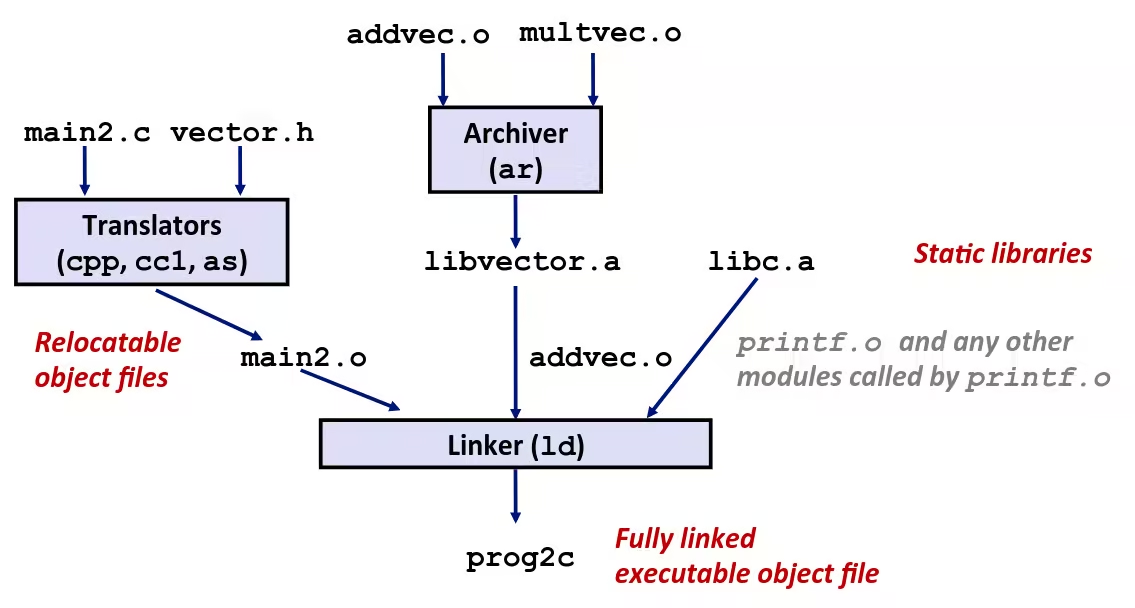
Using Static Libraries
- Linker’s algorithm for resolving external references
- Scan
.ofiles and.afiles in the command line order - During the scan, keep a list of the current unresolved references
- As each new
.oor.afile, obj, is encountered, try to resolve each unresolved reference in the list against the symbols defined in obj - If any entries in the unresolved list at end of scan, then error
- Scan
- Problem
- Command line order matters!
- Moral: put libraries at the end of the command line
unix> gcc -L. libtest.o -lmineunix> gcc -L. -lmine libtest.olibtest.o: In function `main':libtest.o(.text+0x4): undefined reference to `libfun'Shared Libraries
-
Static libraries have the following disadvantages
- Duplication in the stored executables (every function needs libc)
- Duplication in the running executables
- Minor bug fixes of system libraries require each application to explicitly relink
-
Modern solution: Shared Libraries
- Object files that contain code and data that are loaded and linked into an application dynamically, at either load-time or run-time
- Also called: dynamic link libraries, DLLs,
.sofiles
-
Dynamic linking can occur when executable is first loaded and run (load-time linking)
- Common case for Linux, handled automatically by the dynamic linker (
ld-linux.so) Standard C library (libc.so) usually dynamically linked
- Common case for Linux, handled automatically by the dynamic linker (
-
Dynamic linking can also occur after program has begun (run-time linking)
- In Linux, this is done by calls to the
dlopen()interface- Distributing software
- High-performance web servers
- Runtime library interpositioning
- In Linux, this is done by calls to the
-
Shared library routines can be shared by multiple processes
Dynamic Linking at Load-time
Dynamic Linking at Run-time
#include <stdio.h>#include <stdlib.h>#include <dlfcn.h>
int x[2] = {1, 2};int y[2] = {3, 4};int z[2];
int main() { void *handle; void (*addvec)(int *, int *, int *, int); char *error;
/* Dynamically load the shared library that contains addvec() */ handle = dlopen("./libvector.so", RTLD_LAZY); if (!handle) { fprintf(stderr, "%s\n", dlerror()); exit(1); }
/* Get a pointer to the addvec() function we just loaded */ addvec = dlsym(handle, "addvec"); if ((error = dlerror()) != NULL) { fprintf(stderr, "%s\n", error); exit(1); }
/* Now we can call addvec() just like any other function */ addvec(x, y, z, 2); printf("z = [%d %d]\n", z[0], z[1]);
/* Unload the shared library */ if (dlclose(handle) < 0) { fprintf(stderr, "%s\n", dlerror()); exit(1); } return 0;}Library Interpositioning
- Its a powerful linking technique that allows programmers to intercept calls to arbitrary functions
- Interpositioning can occur at:
- Compile time: When the source code is compiled
- Link time: When the relocatable object files are statically linked to form an executable object file
- Load/Run time: When an executable object file is loaded into memory, dynamically linked, and then executed
Example Program
#include <stdio.h>#include <malloc.h>
int main() { int *p = malloc(32); free(p); return(0);}- Goal: trace the addresses and sizes of the allocated and freed blocks, without breaking the program, and without modifying the source code
- Three solutions: interpose on the lib
mallocandfreefunctions at compile time, link time, and load/run time
Compile-time Interpositioning
#ifdef COMPILETIME#include <stdio.h>#include <malloc.h>
/* malloc wrapper function */void *mymalloc(size_t size) { void *ptr = malloc(size); printf("malloc(%d)=%p\n", (int)size, ptr); return ptr;}
/* free wrapper function */void myfree(void *ptr) { free(ptr); printf("free(%p)\n", ptr);}#endif#define malloc(size) mymalloc(size)#define free(ptr) myfree(ptr)
void *mymalloc(size_t size);void myfree(void *ptr);linux> make intcgcc -Wall -DCOMPILETIME -c mymalloc.cgcc -Wall -I. -o intc int.c mymalloc.olinux> make runc./intcmalloc(32)=0x1edc010free(0x1edc010)linux>Link-time Interpositioning
#ifdef LINKTIME#include <stdio.h>
void *__real_malloc(size_t size);void __real_free(void *ptr);
/* malloc wrapper function */void *__wrap_malloc(size_t size) { void *ptr = __real_malloc(size); /* Call libc malloc */ printf("malloc(%d) = %p\n", (int)size, ptr); return ptr;}
/* free wrapper function */void __wrap_free(void *ptr) { __real_free(ptr); /* Call libc free */ printf("free(%p)\n", ptr);}#endiflinux> make intlgcc -Wall -DLINKTIME -c mymalloc.cgcc -Wall -c int.cgcc -Wall -Wl,--wrap,malloc -Wl,--wrap,free -o intl int.o mymalloc.olinux> make runl./intlmalloc(32) = 0x1aa0010free(0x1aa0010)linux>- The
-Wlflag passes argument to linker, replacing each comma with a space - The
--wrap,mallocarg instructs linker to resolve references in a special way:- Refs to
mallocshould be resolved as__wrap_malloc - Refs to
__real_mallocshould be resolved asmalloc
- Refs to
Load/Run time Interpositioning
#ifdef RUNTIME#define _GNU_SOURCE#include <stdio.h>#include <stdlib.h>#include <dlfcn.h>
/* malloc wrapper function */void *malloc(size_t size) { void *(*mallocp)(size_t size); char *error;
mallocp = dlsym(RTLD_NEXT, "malloc"); /* Get addr of libc malloc */ if ((error = dlerror()) != NULL) { fputs(error, stderr); exit(1); } char *ptr = mallocp(size); /* Call libc malloc */ printf("malloc(%d) = %p\n", (int)size, ptr); return ptr;}
/* free wrapper function */void free(void *ptr) { void (*freep)(void *) = NULL; char *error;
if (!ptr) return;
freep = dlsym(RTLD_NEXT, "free"); /* Get address of libc free */ if ((error = dlerror()) != NULL) { fputs(error, stderr); exit(1); } freep(ptr); /* Call libc free */ printf("free(%p)\n", ptr);}#endiflinux> make intrgcc -Wall -DRUNTIME -shared -fpic -o mymalloc.so mymalloc.c -ldlgcc -Wall -o intr int.clinux> make runr(LD_PRELOAD="./mymalloc.so" ./intr)malloc(32) = 0xe60010free(0xe60010)linux>- The
LD_PRELOADenvironment variable tells the dynamic linker to resolve unresolved refs (e.g., tomalloc) by looking inmymalloc.sofirst
Exceptional Control Flow
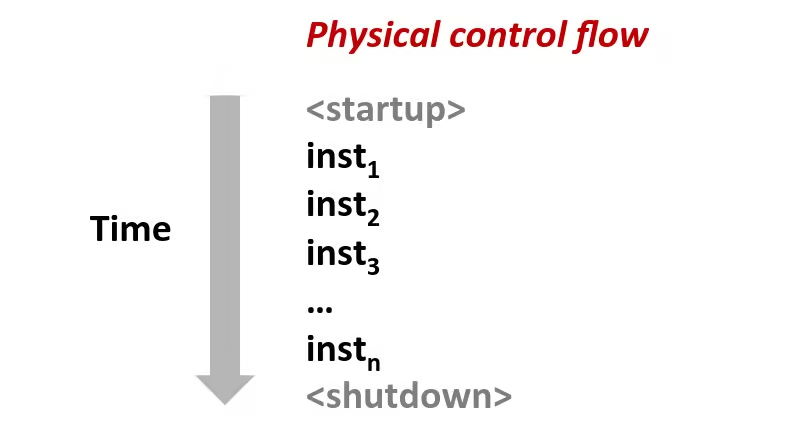
Control Flow
- Processors do only one thing:
- From startup to shutdown, a CPU simply reads and executes (interprets) a sequence of instructions, one at a time
- This sequence is the CPU’s control flow (or flow of control)
Up to now, we have learned two mechanisms for changing control flow:
- Jumps and branches
- Call and return
They react to changes in program state.
But its insufficient for a useful system: difficult to react to changes in system state:
- Data arrives from a disk or a network adapter
- Instruction divides by zero
- User hits
Ctrl-Cat the keyboard - System timer expires
That’s why we need mechanisms for “exceptional control flow”.
Exceptional Control Flow
- Exists at all levels of a computer system
- Low level mechanisms
- Exceptions
- Change in control flow in response to a system event (i.e., change in system state)
- Implemented using combination of hardware and OS software
- Exceptions
- Higher level mechanisms
- Process context switch
- Implemented by OS software and hardware timer
- Signals
- Implemented by OS software
- Nonlocal jumps:
setjmp()andlongjmp()- Implemented by C runtime library
- Process context switch
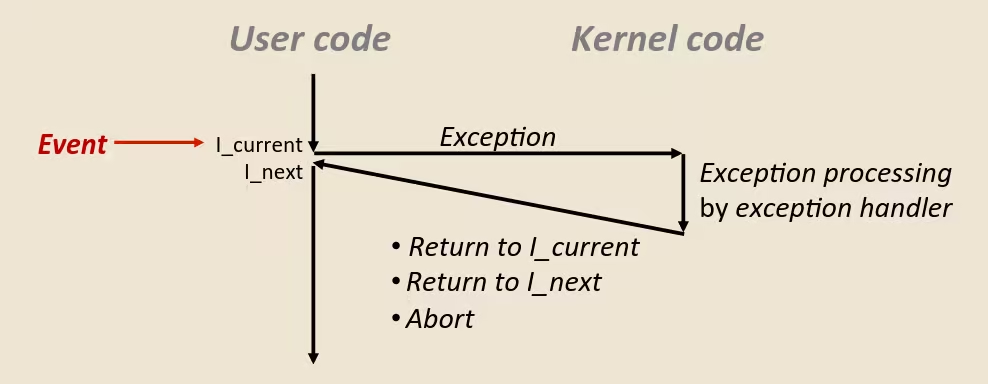
Exceptions
- An exception is a transfer of control to the OS kernel in response to some event (i.e., change in processor state)
- Kernel is the memory-resident part of the OS
- Examples of events: Divide by 0, arithmetic overflow, page fault, I/O request completes, typing
Ctrl‐C
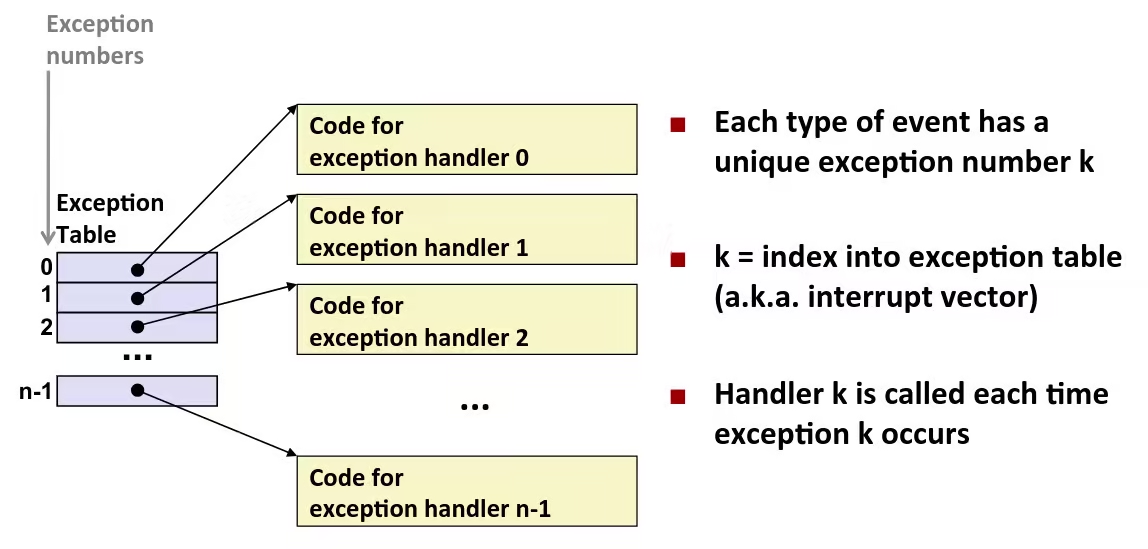
Exception Tables
Synchronous Exceptions
- Caused by events that occur as a result of executing an instruction
- Traps
- Intentional (e.g., system calls, breakpoint traps, special instructions)
- Returns control to “next” instruction
- Faults
- Unintentional but possibly recoverable (e.g., page faults (recoverable), protection faults (unrecoverable), floating point exceptions)
- Either re-executes faulting (“current”) instruction or aborts
- Aborts
- Unintentional and unrecoverable (e.g., illegal instruction, parity error, machine check)
- Aborts current program
- Traps
Asynchronous Exceptions (Interrupts)
- Caused by events external to the processor
- Indicated by setting the processor’s interrupt pin
- Handler returns to “next” instruction
- Examples:
- Timer interrupt
- Every few ms, an external timer chip triggers an interrupt
- Used by the kernel to take back control from user programs
- I/O interrupt from external device
- Hitting
Ctrl-Cat the keyboard - Arrival of a packet from a network
- Arrival of data from a disk
- Hitting
- Timer interrupt
Processes
- Definition: A process is an instance of a running program
- One of the most profound ideas in computer science
- Not the same as “program” or “processor”
- Process provides each program with two key abstractions:
- Logical control flow
- Each program seems to have exclusive use of the CPU
- Provided by kernel mechanism called context switching
- Private address space
- Each program seems to have exclusive use of main memory
- Provided by kernel mechanism called virtual memory
- Logical control flow
Multiprocessing: The Illusion
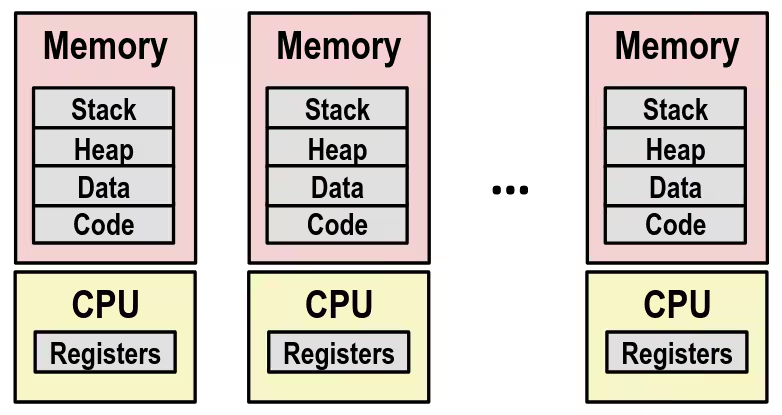
- Computer runs many processes simultaneously
- Applications for one or more users
- Web browsers, email clients, editors, …
- Background tasks
- Monitoring network & I/O devices
- Applications for one or more users
Multiprocessing: The (Traditional) Reality
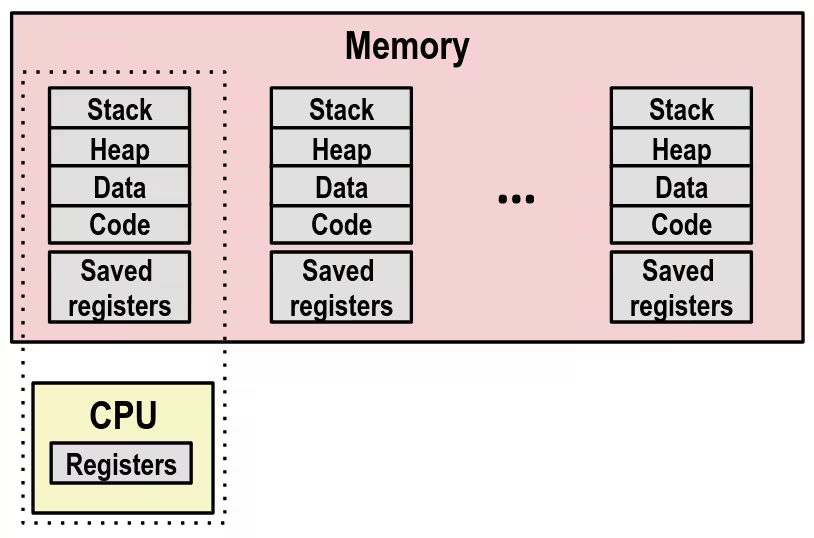
- Single processor executes multiple processes concurrently
- Process executions interleaved (multitasking)
- Address spaces managed by virtual memory system
- Register values for non-executing processes saved in memory
- Save current registers in memory
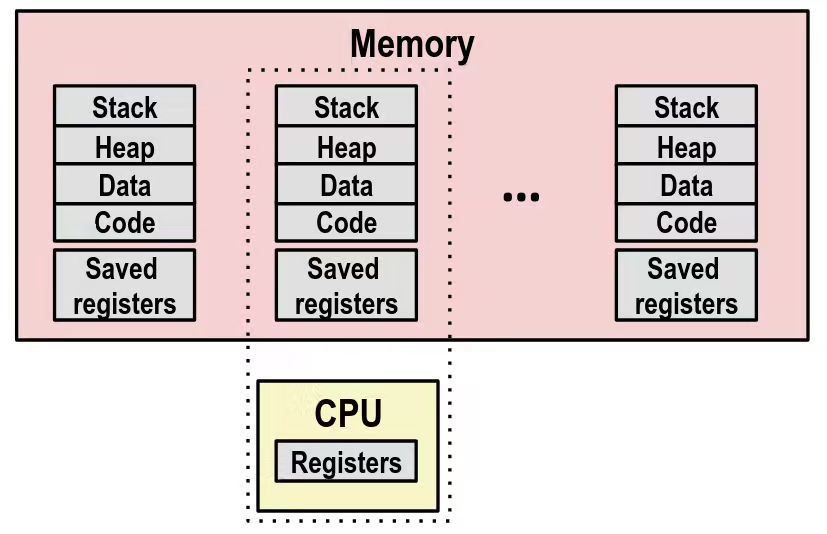
- Schedule next process for execution
- Load saved registers and switch address space (context switch)
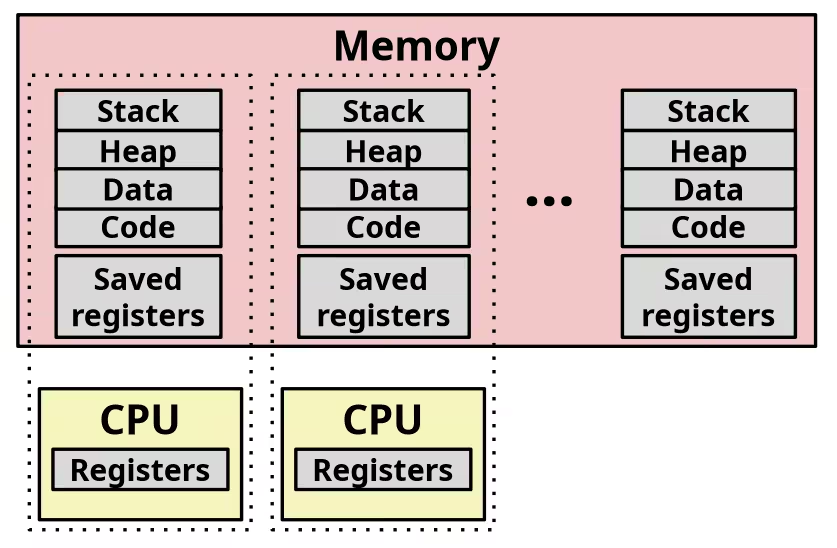
Multiprocessing: The (Modern) Reality
- Multicore processors
- Multiple CPUs on single chip
- Share main memory (and some of the caches)
- Each can execute a separate process
- Scheduling of processors onto cores done by kernel
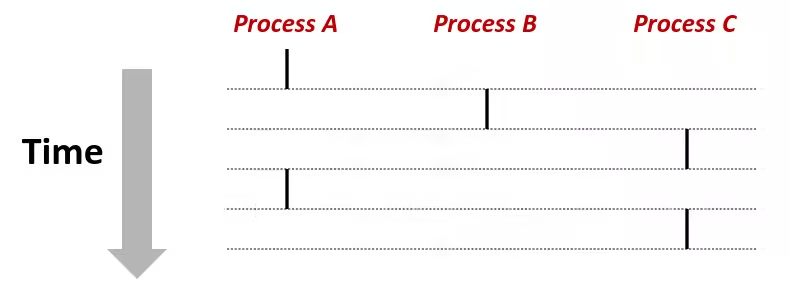
Concurrent Processes
- Each process is a logical control flow
- Two processes run concurrently (are concurrent) if their flows overlap in time
- Otherwise, they are sequential
- Examples (running on single core):
- Concurrent: A & B, A & C
- Sequential: B & C
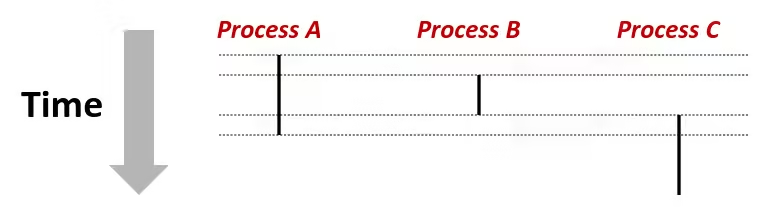
User View of Concurrent Processes
- Control flows for concurrent processes are physically disjoint in time
- However, we can think of concurrent processes as running in parallel with each other
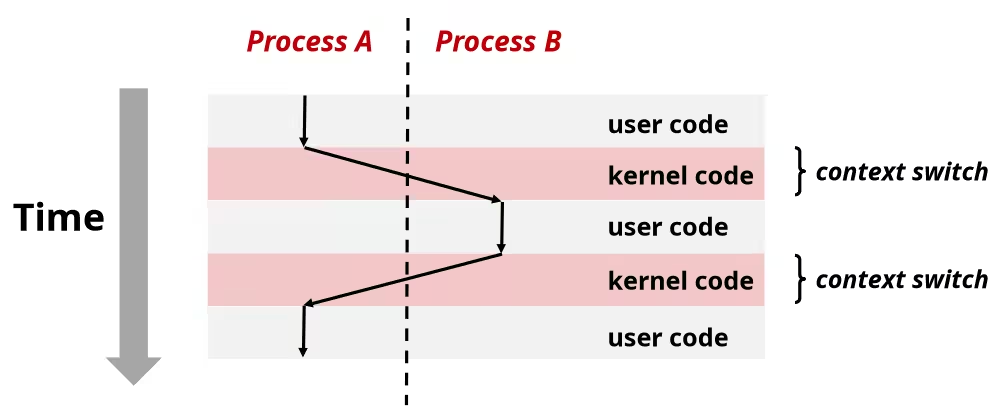
Context Switching
- Processes are managed by a shared chunk of memory-resident OS code called the kernel
- Important: the kernel is not a separate process, but rather runs as part of some existing process
- Control flow passes from one process to another via a context switch
Process Control
System Call Error Handling
- On error, Linux system-level functions typically return
‐1and set global variableerrnoto indicate cause - Hard and fast rule:
- You must check the return status of every system-level function
- Only exception is the handful of functions that return
void
if ((pid = fork()) < 0) { fprintf(stderr, "fork error: %s\n", strerror(errno)); exit(0);}Error-reporting functions
- Can simplify somewhat using an error-reporting function:
/* Unix-style error */void unix_error(char *msg) { fprintf(stderr, "%s: %s\n", msg, strerror(errno)); exit(0);}
if ((pid = fork()) < 0) unix_error("fork error");Error-handling Wrappers
- Simplify the present code even further by using Stevens-style error-handling wrappers:
pid_t Fork(void) { pid_t pid;
if ((pid = fork()) < 0) unix_error("Fork error"); return pid;}
pid = Fork();Processes States
From a programmer’s perspective, we can think of a process as being in one of three states:
- Running
- Process is either executing, or waiting to be executed and will eventually be scheduled (i.e., chosen to execute) by the kernel
- Stopped
- Process execution is suspended and will not be scheduled until further notice
- Terminated
- Process is stopped permanently
Creating Processes
- Parent process creates a new running child process by calling
fork int fork(void)- Returns
0to the child process, child’s PID to parent process - Child is almost identical to parent:
- Child get an identical (but separate) copy of the parent’s virtual address space
- Child gets identical copies of the parent’s open file descriptors
- Child has a different PID than the parent
- Returns
forkis interesting (and often confusing) because it is called once but returns twice
fork Example
int main() { pid_t pid; int x = 1;
pid = Fork(); if (pid == 0) { /* Child */ printf("child: x=%d\n", ++x); exit(0); }
/* Parent */ printf("parent: x=%d\n", --x); exit(0);}linux> ./forkparent: x=0child: x=2- Call once, return twice
- Concurrent execution
- Can’t predict execution order of parent and child
- Duplicate but separate address space
xhas a value of 1 when fork returns in parent and child- Subsequent changes to
xare independent
- Shared open files
stdoutis the same in both parent and child
Terminating Processes
- Process becomes terminated for one of three reasons:
- Receiving a signal whose default action is to terminate
- Returning from the
mainroutine - Calling the
exitfunction
void exit(int status)- Terminates with an exit status of status
- Convention: normal return status is
0, nonzero on error - Another way to explicitly set the exit status is to return an integer value from the main routine
exitis called once but never returns
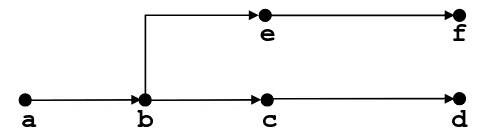
Modeling fork with Process Graphs
- A process graph is a useful tool for capturing the partial ordering of statements in a concurrent program:
- Each vertex is the execution of a statement
a ‐> bmeansahappens beforeb- Edges can be labeled with current value of variables
printfvertices can be labeled with output- Each graph begins with a vertex with no inedges
- Any topological sort of the graph corresponds to a feasible total ordering
- Total ordering of vertices where all edges point from left to right
Process Graph Example
int main() { pid_t pid; int x = 1;
pid = Fork(); if (pid == 0) { /* Child */ printf("child: x=%d\n", ++x); exit(0); }
/* Parent */ printf("parent: x=%d\n", --x); exit(0);}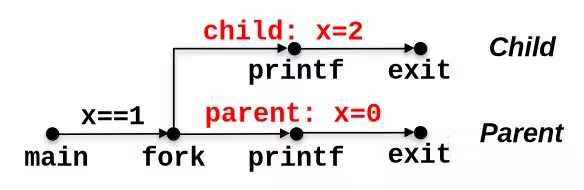
Interpreting Process Graphs
- Original graph:
- Relabled graph:
- Feasible total ordering:
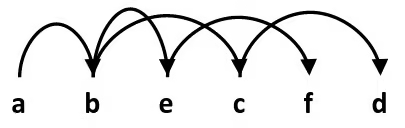
- Infeasible total ordering:
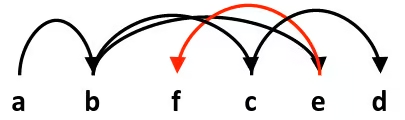
fork Example: Two consecutive forks
void fork2() { printf("L0\n"); fork(); printf("L1\n"); fork(); printf("Bye\n");}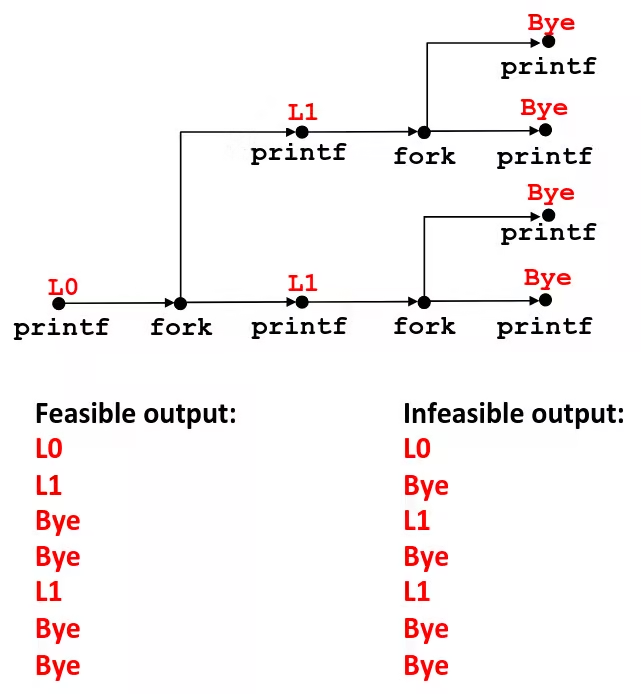
fork Example: Nested forks in parent
void fork4() { printf("L0\n"); if (fork() != 0) { printf("L1\n"); if (fork() != 0) { printf("L2\n"); } } printf("Bye\n");}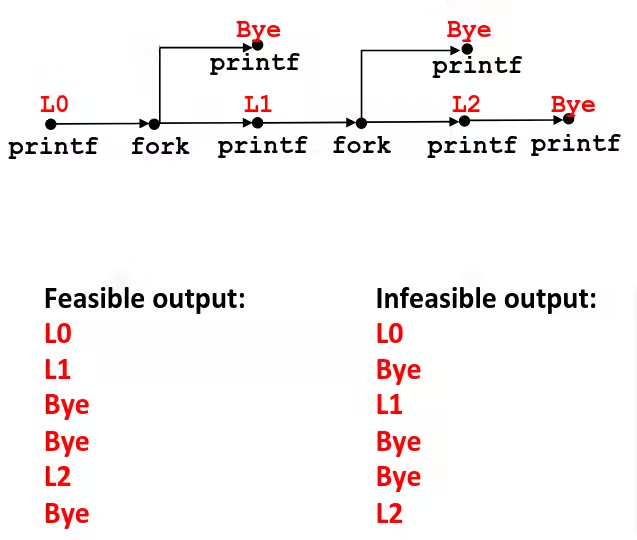
fork Example: Nested forks in children
void fork5() { printf("L0\n"); if (fork() == 0) { printf("L1\n"); if (fork() == 0) { printf("L2\n"); } } printf("Bye\n");}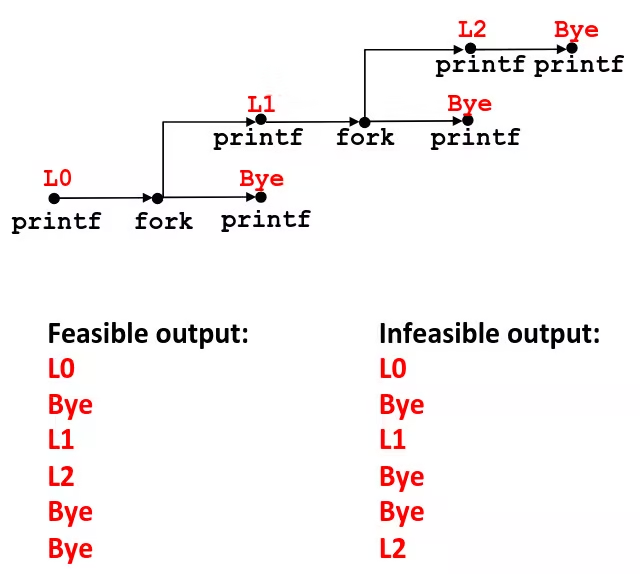
Reaping Child Processes
- Idea
- When process terminates, it still consumes system resources (e.g., Exit status, various OS tables)
- Called a
zombie(Living corpse, half alive and half dead)
- Reaping
- Performed by parent on terminated child (using
waitorwaitpid) - Parent is given exit status information
- Kernel then deletes zombie child process
- Performed by parent on terminated child (using
- What if parent doesn’t reap ?
- If any parent terminates without reaping a child, then the orphaned child will be reaped by
initprocess (pid == 1) - So, only need explicit reaping in long-running processes (e.g., shells and servers)
- If any parent terminates without reaping a child, then the orphaned child will be reaped by
Zombie Example
void fork7() { if (fork() == 0) { /* Child */ printf("Terminating Child, PID = %d\n", getpid()); exit(0); } else { printf("Running Parent, PID = %d\n", getpid()); while (1) ; /* Infinite loop */ }}linux> ./forks 7 &[1] 6639Running Parent, PID = 6639Terminating Child, PID = 6640linux> psPID TTY TIME CMD6585 ttyp9 00:00:00 tcsh6639 ttyp9 00:00:03 forks6640 ttyp9 00:00:00 forks <defunct>6641 ttyp9 00:00:00 pslinux> kill 6639[1] Terminatedlinux> psPID TTY TIME CMD6585 ttyp9 00:00:00 tcsh6642 ttyp9 00:00:00 pspsshows child process as “defunct” (i.e., a zombie)- Killing parent allows child to be reaped by
init
Non-terminating Child Example
void fork8() { if (fork() == 0) { /* Child */ printf("Running Child, PID = %d\n", getpid()); while (1) ; /* Infinite loop */ } else { printf("Terminating Parent, PID = %d\n", getpid()); exit(0); }}linux> ./forks 8Terminating Parent, PID = 6675Running Child, PID = 6676linux> psPID TTY TIME CMD6585 ttyp9 00:00:00 tcsh6676 ttyp9 00:00:06 forks6677 ttyp9 00:00:00 pslinux> kill 6676linux> psPID TTY TIME CMD6585 ttyp9 00:00:00 tcsh6678 ttyp9 00:00:00 ps- Child process still active even though parent has terminated
- Must kill child explicitly, or else will keep running indefinitely
wait: Synchronizing with Children
- Parent reaps a child by calling the
waitfunction int wait(int *child_status)- Suspends current process until one of its children terminates
- Return value is the
pidof the child process that terminated - If
child_status != NULL, then the integer it points to will be set to a value that indicates reason the child terminated and the exit status:- Checked using macros defined in
wait.hWIFEXITED,WEXITSTATUS,WIFSIGNALED,WTERMSIG,WIFSTOPPED,WSTOPSIG,WIFCONTINUED
- Checked using macros defined in
wait Example
void fork9() { int child_status;
if (fork() == 0) { printf("HC: hello from child\n"); exit(0); } else { printf("HP: hello from parent\n"); wait(&child_status); printf("CT: child has terminated\n"); } printf("Bye\n");}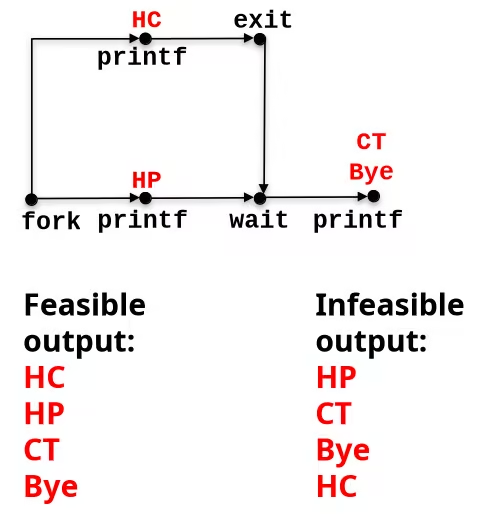
Another wait Example
- If multiple children completed, will take in arbitrary order
- Can use macros
WIFEXITEDandWEXITSTATUSto get information about exit status
void fork10() { pid_t pid[N]; int i, child_status;
for (i = 0; i < N; i++) if ((pid[i] = fork()) == 0) exit(100+i); /* Child */ for (i = 0; i < N; i++) { /* Parent */ pid_t wpid = wait(&child_status); if (WIFEXITED(child_status)) printf("Child %d terminated with exit status %d\n", wpid, WEXITSTATUS(child_status)); else printf("Child %d terminate abnormally\n", wpid); }}waitpid: Waiting for a Specific Process
pid_t waitpid(pid_t pid, int &status, int options)- Suspends current process until specific process terminates
void fork11() { pid_t pid[N]; int i; int child_status;
for (i = 0; i < N; i++) if ((pid[i] = fork()) == 0) exit(100+i); /* Child */ for (i = N-1; i >= 0; i--) { pid_t wpid = waitpid(pid[i], &child_status, 0); if (WIFEXITED(child_status)) printf("Child %d terminated with exit status %d\n", wpid, WEXITSTATUS(child_status)); else printf("Child %d terminate abnormally\n", wpid); }}execve: Loading and Running Programs
int execve(char *filename, char *argv[], char *envp[])- Loads and runs in the current process:
- Executable file
filename- Can be object file or script file beginning with
#!interpreter
- Can be object file or script file beginning with
- …with argument list
argv- By convention
argv[0] == filename
- By convention
- …and environment variable list
envpname=valuestrings (e.g.,USER=root)getenv,putenv,printenv
- Executable file
- Overwrites code, data, and stack
- Retains PID, open files and signal context
- Called once and never returns
- …except if there is an error
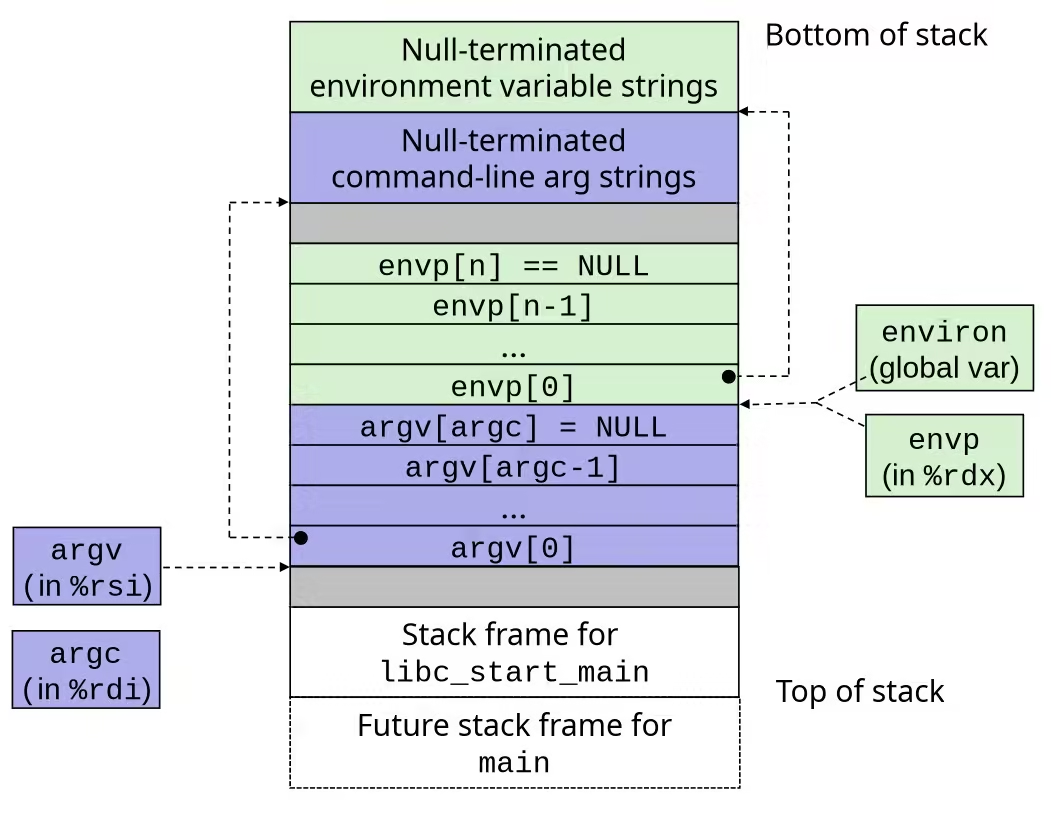
Structure of the stack when a new program starts
Signals
Linux Process Hierarchy
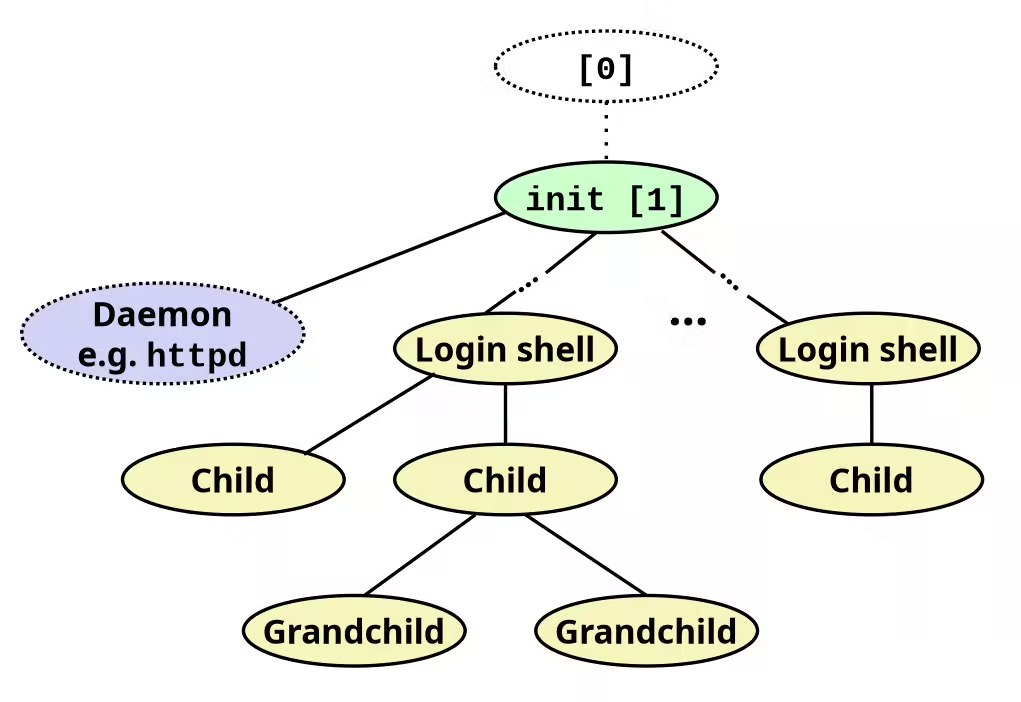
TIPYou can view the hierarchy using the
pstreecommand.
Shell Programs
- A shell is an application program that runs programs on behalf of the user
sh: Original Unix shell (Stephen Bourne, AT&T Bell Labs, 1977)csh/tcsh: BSD Unix C shellbash: “Bourne-Again” Shell (default Linux shell)
- Execution is a sequence of read/evaluate steps
int main() { char cmdline[MAXLINE]; /* command line */
while (1) { /* read */ printf("> "); fgets(cmdline, MAXLINE, stdin);
if (feof(stdin)) exit(0);
/* evaluate */ eval(cmdline); }}void eval(char *cmdline) { char *argv[MAXARGS]; /* Argument list execve() */ char buf[MAXLINE]; /* Holds modified command line */ int bg; /* Should the job run in bg or fg? */ pid_t pid; /* Process id */
strcpy(buf, cmdline); bg = parseline(buf, argv);
if (argv[0] == NULL) return; /* Ignore empty lines */
if (!builtin_command(argv)) { if ((pid = Fork()) == 0) { /* Child runs user job */ if (execve(argv[0], argv, environ) < 0) { printf("%s: Command not found.\n", argv[0]); exit(0); } }
/* Parent waits for foreground job to terminate */ if (!bg) { int status; if (waitpid(pid, &status, 0) < 0) unix_error("waitfg: waitpid error"); } else printf("%d %s", pid, cmdline); } return;}Problem with Simple Shell Example
- Our example shell correctly waits for and reaps foreground jobs
- But what about background jobs ?
- Will become zombies when they terminate
- Will never be reaped because shell (typically) will not terminate
- Will create a memory leak that could run the kernel out of memory
Solution: Exceptional Control Flow
- The kernel will interrupt regular processing to alert us when a background process completes
- In Unix, the alert mechanism is called a signal
Signals
- A signal is a small message that notifies a process that an event of some type has occurred in the system
- Akin to exceptions and interrupts
- Sent from the kernel (sometimes at the request of another process) to a process
- Signal type is identified by small integer ID’s (1-30)
- Only information in a signal is its ID and the fact that it arrived
| ID | Name | Default Action | Corresponding Event |
|---|---|---|---|
| 2 | SIGINT | Terminate | User typed Ctrl-C |
| 9 | SIGKILL | Terminate | Kill program (cannot override or ignore) |
| 11 | SIGSEGV | Terminate & Dump | Segmentation violation |
| 14 | SIGALARM | Terminate | Timer signal |
| 17 | SIGCHLD | Ignore | Child stopped or terminated |
Sending a Signal
- Kernel sends (delivers) a signal to a destination process by updating some state in the context of the destination process
- Kernel sends a signal for one of the following reasons:
- Kernel has detected a system event such as divide-by-zero (SIGFPE) or the termination of a child process (SIGCHLD)
- Another process has invoked the
killsystem call to explicitly request the kernel to send a signal to the destination process
Receiving a Signal
- A destination process receives a signal when it is forced by the kernel to react in some way to the delivery of the signal
- Some possible ways to react:
Ignorethe signal (do nothing)Terminatethe process (with optional core dump)Catchthe signal by executing a user-level function calledsignal handler- Akin to a hardware exception handler being called in response to an asynchronous interrupt:
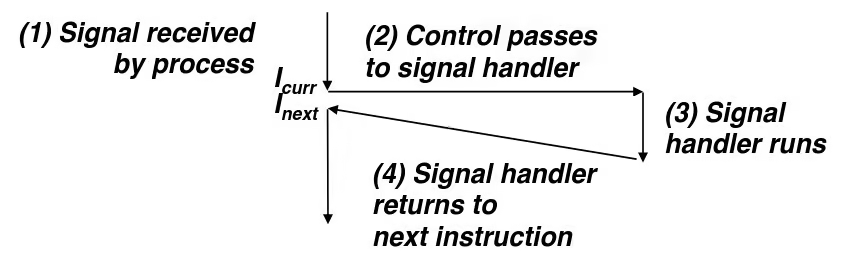
Pending and Blocked Signals
- A signal is pending if sent but not yet received
- There can be at most one pending signal of any particular type
- Signals are not queued
- For each signal type, one bit indicates whether or not signal is pending
- Thus at most one pending signal of any particular type
- Then subsequent signals of the same type that are sent to that process are discarded
- A process can block the receipt of certain signals
- Blocked signals can be delivered, but will not be received until the signal is unblocked
- A pending signal is received at most once
Pending/Blocked Bits
- Kernel maintains pending and blocked bit vectors in the context of each process
pending: represents the set of pending signals- Kernel sets bit in pending when a signal of type is delivered
- Kernel clears bit in pending when a signal of type is received
blocked: represents the set of blocked signals- Can be set and cleared by using the
sigprocmaskfunction - Also referred to as the signal mask
- Can be set and cleared by using the
Sending Signals
Process Groups
- Every process belongs to exactly one process group
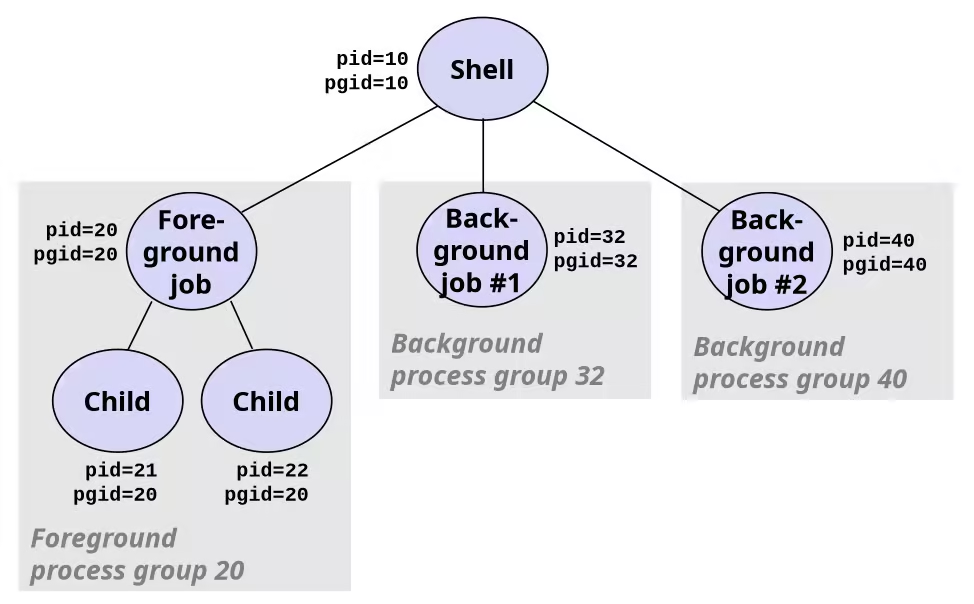
getpgrp()Return process group of current processsetpgid()Change process group of a process
/bin/kill Program
/bin/killprogram sends arbitrary signal to a process or process group- Examples
/bin/kill –9 24818Send SIGKILL to process 24818/bin/kill –9 –24817Send SIGKILL to every process in process group 24817
linux> ./forks 16Child1: pid=24818 pgrp=24817Child2: pid=24819 pgrp=24817linux> psPID TTY TIME CMD24788 pts/2 00:00:00 tcsh24818 pts/2 00:00:02 forks24819 pts/2 00:00:02 forks24820 pts/2 00:00:00 pslinux> /bin/kill -9 -24817linux> psPID TTY TIME CMD24788 pts/2 00:00:00 tcsh24823 pts/2 00:00:00 pslinux>From the Keyboard
- Typing
Ctrl-C(Ctrl-Z) causes the kernel to send a SIGINT (SIGTSTP) to every job in the foreground process group- SIGINT – default action is to terminate each process
- SIGTSTP – default action is to stop (suspend) each process
Example of Ctrl-C and Ctrl-Z
- STAT (process state) Legend:
- First letter:
S: SleepingT: StoppedR: Running
- Second letter:
s: Session leader+: Foreground proc group
- First letter:
bluefish> ./forks 17Child: pid=28108 pgrp=28107Parent: pid=28107 pgrp=28107<types ctrl-z>Suspendedbluefish> ps wPID TTY STAT TIME COMMAND27699 pts/8 Ss 0:00 -tcsh28107 pts/8 T 0:01 ./forks 1728108 pts/8 T 0:01 ./forks 1728109 pts/8 R+ 0:00 ps wbluefish> fg./forks 17<types ctrl-c>bluefish> ps wPID TTY STAT TIME COMMAND27699 pts/8 Ss 0:00 -tcsh28110 pts/8 R+ 0:00 ps wkill Function
void fork12() { pid_t pid[N]; int i; int child_status;
for (i = 0; i < N; i++) if ((pid[i] = fork()) == 0) { /* Child: Infinite Loop */ while(1) ; }
for (i = 0; i < N; i++) { printf("Killing process %d\n", pid[i]); kill(pid[i], SIGINT); }
for (i = 0; i < N; i++) { pid_t wpid = wait(&child_status); if (WIFEXITED(child_status)) printf("Child %d terminated with exit status %d\n", wpid, WEXITSTATUS(child_status)); else printf("Child %d terminated abnormally\n", wpid); }}Receiving Signals
- Suppose kernel is returning from an exception handler and is ready to pass control to process
IMPORTANTAll context switches are initiated by calling some exception handler.
- Kernel computes
pnb = pending & ~blocked- The set of pending nonblocked signals for process
- If
pnb == 0- Pass control to next instruction in the logical flow for
- Else
- Choose least nonzero bit in
pnband force process to receive signal - The receipt of the signal triggers some action by
- Repeat for all nonzero in
pnb - Pass control to next instruction in logical flow for
- Choose least nonzero bit in
Default Actions
- Each signal type has a predefined default action, which is one of:
- The process terminates
- The process terminates and dumps core
- The process stops until restarted by a SIGCONT signal
- The process ignores the signal
Installing Signal Handlers
- The signal function modifies the default action associated with the receipt of signal
signum:handler_t *signal(int signum, handler_t *handler)
- Different values for handler:
SIG_IGN: Ignore signals of type signumSIG_DFL: Revert to the default action on receipt of signals of type signum- Otherwise,
handleris the address of a user-level signal handler- Called when process receives signal of type signum
- Referred to as “installing” the handler
- Executing handler is called “catching” or “handling” the signal
- When the handler executes its return statement, control passes back to instruction in the control flow of the process that was interrupted by receipt of the signal
/* SIGINT handler */void sigint_handler(int sig) { printf("So you think you can stop the bomb with ctrl-c, do you?\n"); sleep(2); printf("Well..."); fflush(stdout); sleep(1); printf("OK. :-)\n"); exit(0);}
int main() { /* Install the SIGINT handler */ if (signal(SIGINT, sigint_handler) == SIG_ERR) unix_error("signal error");
/* Wait for the receipt of a signal */ pause();
return 0;}Signals Handlers as Concurrent Flows
- A signal handler is a separate logical flow (not process) that runs concurrently with the main program
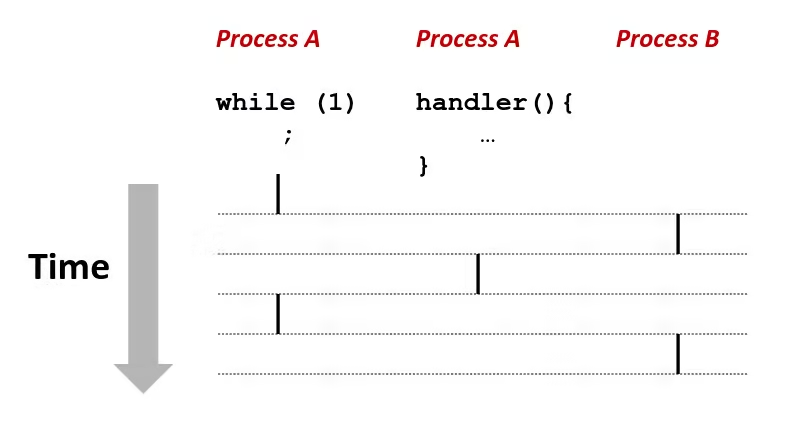
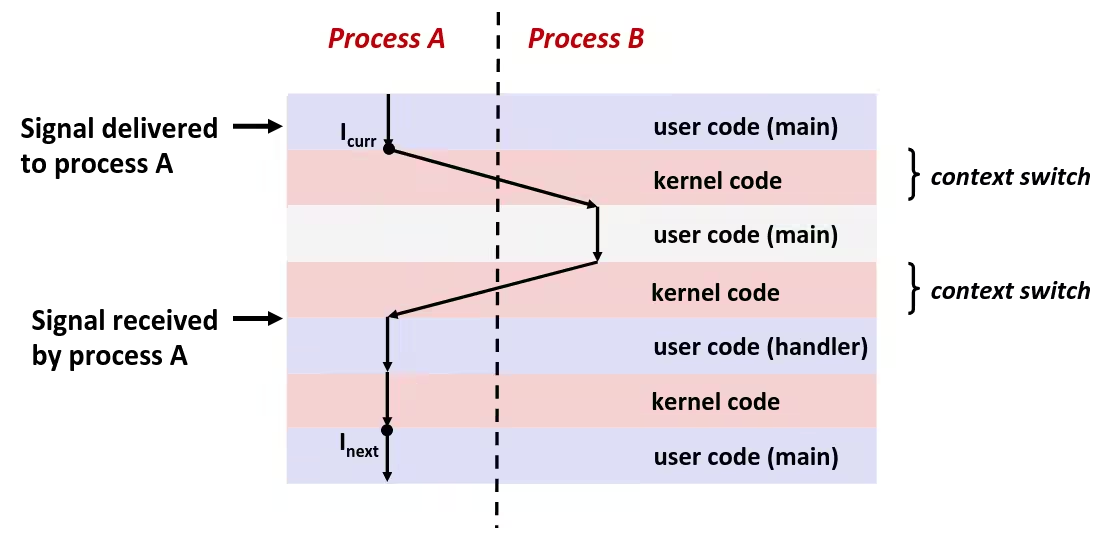
Nested Signal Handlers
- Handlers can be interrupted by other handlers
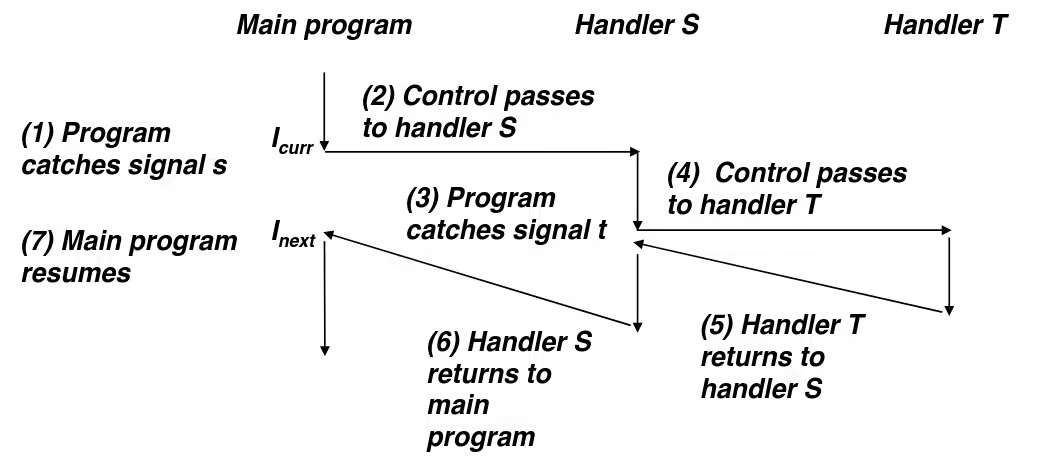
Blocking and Unblocking Signals
- Implicit blocking mechanism
- Kernel blocks any pending signals of type currently being handled
- E.g., A SIGINT handler can’t be interrupted by another SIGINT
- Explicit blocking and unblocking mechanism
sigprocmaskfunction
- Supporting functions
sigemptyset– Create empty setsigfillset– Add every signal number to setsigaddset– Add signal number to setsigdelset– Delete signal number from set
Temporarily Blocking Signals
sigset_t mask, prev_mask;
sigemptyset(&mask);sigaddset(&mask, SIGINT);
/* Block SIGINT and save previous blocked set */sigprocmask(SIG_BLOCK, &mask, &prev_mask);
/* Code region that will not be interrupted by SIGINT */
/* Restore previous blocked set, unblocking SIGINT */sigprocmask(SIG_SETMASK, &prev_mask, NULL);Safe Signal Handling Guidelines
Handlers are tricky because they are concurrent with main program and share the same global data structures. Shared data structures can become corrupted.
- G0: Keep your handlers as simple as possible
- E.g., Set a global flag and return
- G1: Call only async-signal-safe functions in your handlers
printf,sprintf,malloc, andexitare not safe !
- G2: Save and restore
errnoon entry and exit- So that other handlers don’t overwrite your value of errno
- G3: Protect accesses to shared data structures by temporarily blocking all signals
- To prevent possible corruption
- G4: Declare global variables as
volatile- To prevent compiler from storing them in a register
- G5: Declare global flags as
volatile sig_atomic_t- flag: variable that is only read or written (e.g.
flag = 1, notflag++) - Flag declared this way does not need to be protected like other globals
- flag: variable that is only read or written (e.g.
Async-Signal-Safety
- Function is async-signal-safe if either reentrant (e.g., all variables stored on stack frame) or non-interruptible by signals
- Posix guarantees 117 functions to be async-signal-safe
- Source:
man 7 signal - Popular functions on the list:
_exit,write,wait,waitpid,sleep,kill
- Popular functions that are not on the list:
printf,sprintf,malloc,exit- Unfortunate fact:
writeis the only async-signal-safe output function
- Source:
Correct Signal Handling Example
You can’t use signals to count events, such as children terminating.
#define N 5
int ccount = 0;
void child_handler(int sig) { int olderrno = errno; pid_t pid;
if ((pid = wait(NULL)) < 0) Sio_error("wait error");
ccount--; Sio_puts("Handler reaped child "); Sio_putl((long)pid); Sio_puts(" \n"); sleep(1); errno = olderrno;}
void fork14() { pid_t pid[N]; int i; ccount = N;
signal(SIGCHLD, child_handler);
for (i = 0; i < N; i++) { if ((pid[i] = fork()) == 0) { sleep(1); exit(0); /* Child exits */ } }
while (ccount > 0) /* Parent spins */ ;}whaleshark> ./forks 14Handler reaped child 23240Handler reaped child 23241Must wait for all terminated child processes. Put wait in a loop to reap all terminated children.
void child_handler2(int sig) { int olderrno = errno; pid_t pid;
while ((pid = wait(NULL)) > 0) { ccount--; Sio_puts("Handler reaped child "); Sio_putl((long)pid); Sio_puts(" \n"); } if (errno != ECHILD) Sio_error("wait error"); errno = olderrno;}whaleshark> ./forks 15Handler reaped child 23246Handler reaped child 23247Handler reaped child 23248Handler reaped child 23249Handler reaped child 23250whaleshark>Portable Signal Handling
- Ugh ! Different versions of Unix can have different signal handling semantics
- Some older systems restore action to default after catching signal
- Some interrupted system calls can return with
errno == EINTR - Some systems don’t block signals of the type being handled
- Solution:
sigaction
handler_t *signal(int signum, handler_t *handler) { struct sigaction action, old_action;
action.sa_handler = handler; sigemptyset(&action.sa_mask); /* Block sigs of type being handled */ action.sa_flags = SA_RESTART; /* Restart syscalls if possible */
if (sigaction(signum, &action, &old_action) < 0) unix_error("Signal error"); return (old_action.sa_handler);}Synchronizing Flows to Avoid Races
- Simple shell with a subtle synchronization error because it assumes parent runs before child
int main(int argc, char **argv) { int pid; sigset_t mask_all, prev_all;
sigfillset(&mask_all); signal(SIGCHLD, handler); initjobs(); /* Initialize the job list */
while (1) { if ((pid = Fork()) == 0) { /* Child */ execve("/bin/date", argv, NULL); } sigprocmask(SIG_BLOCK, &mask_all, &prev_all); /* Parent */ addjob(pid); /* Add the child to the job list */ sigprocmask(SIG_SETMASK, &prev_all, NULL); } exit(0);}void handler(int sig) { int olderrno = errno; sigset_t mask_all, prev_all; pid_t pid;
sigfillset(&mask_all); while ((pid = waitpid(-1, NULL, 0)) > 0) { /* Reap child */ sigprocmask(SIG_BLOCK, &mask_all, &prev_all); deletejob(pid); /* Delete the child from the job list */ sigprocmask(SIG_SETMASK, &prev_all, NULL); } if (errno != ECHILD) Sio_error("waitpid error"); errno = olderrno;}Corrected Shell Program without Race
int main(int argc, char **argv) { int pid; sigset_t mask_all, mask_one, prev_one;
sigfillset(&mask_all); sigemptyset(&mask_one); sigaddset(&mask_one, SIGCHLD); signal(SIGCHLD, handler); initjobs(); /* Initialize the job list */
while (1) { sigprocmask(SIG_BLOCK, &mask_one, &prev_one); /* Block SIGCHLD */ if ((pid = Fork()) == 0) { /* Child process */ sigprocmask(SIG_SETMASK, &prev_one, NULL); /* Unblock SIGCHLD */ execve("/bin/date", argv, NULL); } sigprocmask(SIG_BLOCK, &mask_all, NULL); /* Parent process */ addjob(pid); /* Add the child to the job list */ sigprocmask(SIG_SETMASK, &prev_one, NULL); /* Unblock SIGCHLD */ } exit(0);}Explicitly Waiting for Signals
- Handlers for program explicitly waiting for SIGCHLD to arrive
volatile sig_atomic_t pid;
void sigchld_handler(int s) { int olderrno = errno; pid = waitpid(-1, NULL, 0); /* Main is waiting for nonzero pid */ errno = olderrno;}
void sigint_handler(int s) {}Similar to a shell waiting for a foreground job to terminate:
int main(int argc, char **argv) { sigset_t mask, prev;
signal(SIGCHLD, sigchld_handler); signal(SIGINT, sigint_handler); sigemptyset(&mask); sigaddset(&mask, SIGCHLD);
while (1) { sigprocmask(SIG_BLOCK, &mask, &prev); /* Block SIGCHLD */ if (fork() == 0) /* Child */ exit(0);
/* Parent */ pid = 0; sigprocmask(SIG_SETMASK, &prev, NULL); /* Unblock SIGCHLD */
/* Wait for SIGCHLD to be received (wasteful!) */ while (!pid) ;
/* Do some work after receiving SIGCHLD */ printf("."); } exit(0);}- Program is correct, but very wasteful
Other options:
while (!pid) /* Race! */ pause();while (!pid) /* Too slow! */ sleep(1);- Solution:
sigsuspend
Waiting for Signals with sigsuspend
int sigsuspend(const sigset_t *mask)- It’ll temporarily use
const sigset_t *maskinstead of currently signal block mask, then hang on program. Once catch signal, revert the signal block mask to original one
- It’ll temporarily use
int main(int argc, char **argv) { sigset_t mask, prev;
signal(SIGCHLD, sigchld_handler); signal(SIGINT, sigint_handler); sigemptyset(&mask); sigaddset(&mask, SIGCHLD);
while (1) { sigprocmask(SIG_BLOCK, &mask, &prev); /* Block SIGCHLD */ if (fork() == 0) /* Child */ exit(0);
/* Wait for SIGCHLD to be received */ pid = 0; while (!pid) sigsuspend(&prev);
/* Optionally unblock SIGCHLD */ sigprocmask(SIG_SETMASK, &prev, NULL); /* Do some work after receiving SIGCHLD */ printf("."); } exit(0);}Nonlocal Jumps
-
Powerful (but dangerous) user-level mechanism for transferring control to an arbitrary location
- Controlled to way to break the procedure call / return discipline
- Useful for error recovery and signal handling
-
int setjmp(jmp_buf buf)- Must be called before longjmp
- Identifies a return site for a subsequent longjmp
- Called once, returns one or more times
- Implementation:
- Remember where you are by storing the current register context, stack pointer, and PC value in
buf - Return
0
- Remember where you are by storing the current register context, stack pointer, and PC value in
-
int sigsetjmp(sigjmp_buf buf, int save);- Similar as setjmp,
saveindicates whether save signal block mask (can only be0(don’t save) or1(save))
- Similar as setjmp,
-
void longjmp(jmp_buf buf, int val)- Meaning:
- return from the setjmp remembered by jump buffer
bufagain… - …this time returning
valinstead of0(ifvalis0, force return1)
- return from the setjmp remembered by jump buffer
- Called after setjmp
- Called once, but never returns
- Implementation:
- Restore register context, stack pointer, base pointer, PC value from jump buffer
buf - Set %eax to
val - Jump to the location indicated by the PC stored in jump buf
buf
- Restore register context, stack pointer, base pointer, PC value from jump buffer
- Meaning:
-
void siglongjmp(sigjmp_buf buf, int val);- Same as longjmp, just using with sigsetjmp
setjmp/longjmp Example
- Goal: return directly to original caller from a deeply-nested function
jmp_buf buf;
int error1 = 0;int error2 = 1;
void foo(void), bar(void);
int main() { switch(setjmp(buf)) { case 0: foo(); break; case 1: printf("Detected an error1 condition in foo\n"); break; case 2: printf("Detected an error2 condition in foo\n"); break; default: printf("Unknown error condition in foo\n"); } exit(0);}
/* Deeply nested function foo */void foo(void) { if (error1) longjmp(buf, 1); bar();}
void bar(void) { if (error2) longjmp(buf, 2);}
// Output: Detected an error2 condition in foosigsetjmp/siglongjmp Example
This program restarts itself when Ctrl-C’d:
sigjmp_buf buf;
void handler(int sig) { siglongjmp(buf, 1);}
int main() { if (!sigsetjmp(buf, 1)) { signal(SIGINT, handler); Sio_puts("starting\n"); } else Sio_puts("restarting\n");
while(1) { sleep(1); Sio_puts("processing...\n"); } exit(0); /* Control never reaches here */}Limitations of Nonlocal Jumps
- Works within stack discipline
- Can only long jump to environment of function that has been called but not yet completed
jmp_buf env;
P1() { if (setjmp(env)) { /* Long Jump to here */ } else { P2(); }}P2() { . . . P2(); . . . P3(); }P3() { longjmp(env, 1);}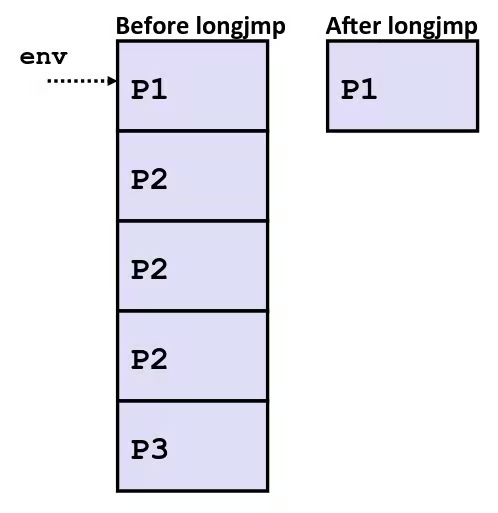
jmp_buf env;
P1() { P2(); P3();}
P2() { if (setjmp(env)) { /* Long Jump to here */ }}
P3() { longjmp(env, 1);}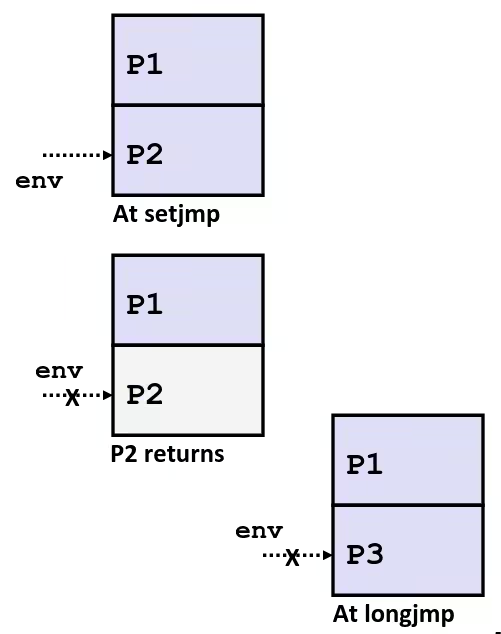
Virtual Memory
TODO
Dynamic Memory Allocation
- Assumptions for following examples:
- Memory is word addressed
- Words are int-sized
Basic Concepts
- Programmers use dynamic memory allocators (such as malloc) to acquire virtual memory at runtime
- For data structures whose size is only known at runtime
- Dynamic memory allocators manage an area of process virtual memory known as the heap
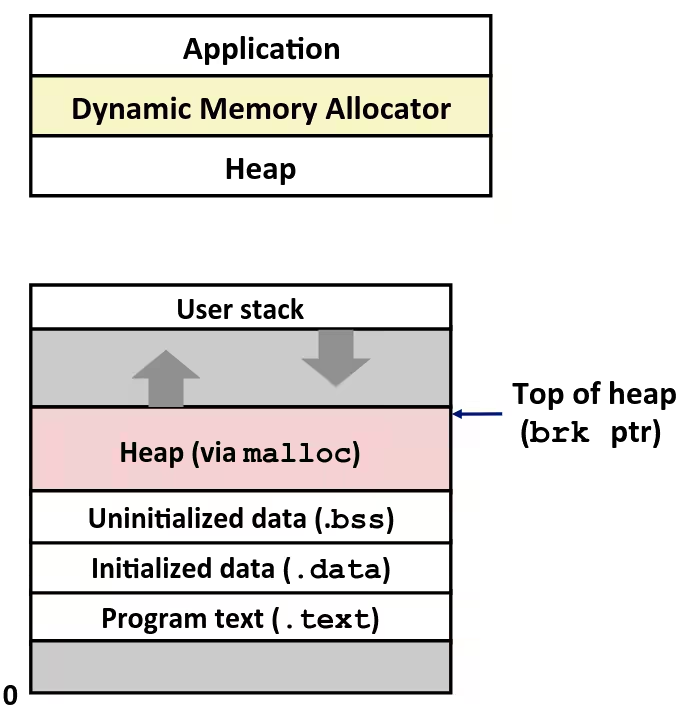
- Allocator maintains heap as collection of variable sized blocks, which are either allocated or free
- Types of allocators
- Explicit allocator: application allocates and frees space
- E.g., malloc and free in C
- Implicit allocator: application allocates, but does not free space
- E.g. garbage collection in Java, ML, and Lisp
- Explicit allocator: application allocates and frees space
The malloc Package
void *malloc(size_t size)- Successful:
- Returns a pointer to a memory block of at least size bytes aligned to an 8-byte (x86) or 16-byte (x86-64) boundary
- If
size == 0, returns NULL
- Unsuccessful: returns NULL (0) and sets errno
- Successful:
void free(void *p)- Returns the block pointed at by p to pool of available memory
- p must come from a previous call to malloc or realloc
- Other functions
calloc: Version of malloc that initializes allocated block to zerorealloc: Changes the size of a previously allocated blocksbrk: Used internally by allocators to grow or shrink the heap
#include <stdio.h>#include <stdlib.h>
void foo(int n) { int i, *p;
/* Allocate a block of n ints */ p = (int *)malloc(n * sizeof(int)); if (p == NULL) { perror("malloc"); exit(0); }
/* Initialize allocated block */ for (i = 0; i < n; i++) p[i] = i;
/* Return allocated block to the heap */ free(p);}Constrains
- Applications
- Can issue arbitrary sequence of malloc and free requests
- free request must be to a malloc’d block
- Allocators
- Can’t control number or size of allocated blocks
- Must respond immediately to malloc requests
- i.e., can’t reorder or buffer requests
- Must allocate blocks from free memory
- i.e., can only place allocated blocks in free memory
- Must align blocks so they satisfy all alignment requirements
- 8-byte (x86) or 16-byte (x86-64) alignment on Linux boxes
- Can manipulate and modify only free memory
- Can’t move the allocated blocks once they are malloc’d
- i.e., compaction is not allowed
Performance Goal
- Goals: maximize throughput and peak memory utilization
- These goals are often conflicting
Throughput
- Given some sequence of malloc and free requests:
- Throughput
- Number of completed requests per unit time
- Example:
- 5,000 malloc calls and 5,000 free calls in 10 seconds
- Throughput is 1,000 operations/second
Peak Memory Utilization
- Given some sequence of malloc and free requests:
- Def: Aggregate payload
malloc(p)results in a block with a payload of p bytes- After request has completed, the aggregate payload is the sum of currently allocated payloads
- Def: Current heap size
- Assume is monotonically nondecreasing
- i.e., heap only grows when allocator uses sbrk
- Assume is monotonically nondecreasing
- Def: Peak memory utilization after requests
Fragmentation
- Poor memory utilization caused by fragmentation
- internal fragmentation
- external fragmentation
Internal Fragmentation
- For a given block, internal fragmentation occurs if payload is smaller than block size

- Caused by
- Overhead of maintaining heap data structures
- Padding for alignment purposes
- Explicit policy decisions
- E.g., to return a big block to satisfy a small request
- Depends only on the pattern of previous requests
- Thus, easy to measure
External Fragmentation
- Occurs when there is enough aggregate heap memory, but no single free block is large enough
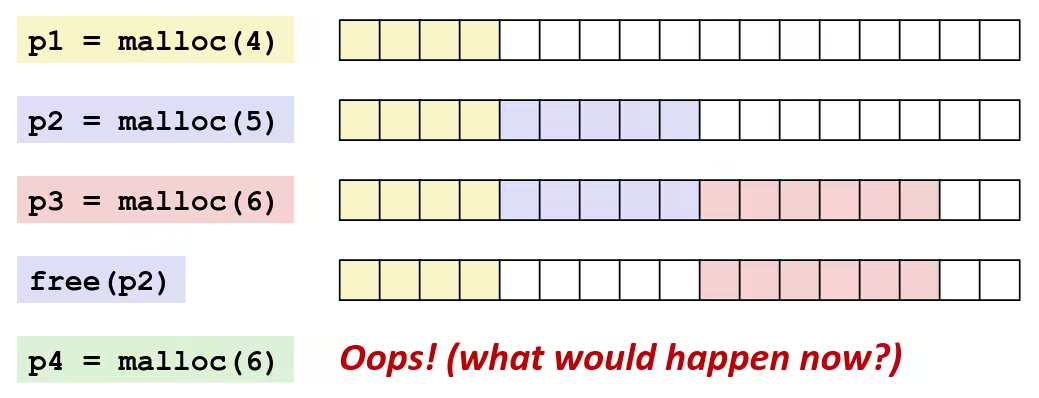
- Depends on the pattern of future requests
- Thus, difficult to measure
Implementation Issues
- How do we know how much memory to free given just a pointer ?
- How do we keep track of the free blocks ?
- What do we do with the extra space when allocating a structure that is smaller than the free block it is placed in ?
- How do we pick a block to use for allocation — many might fit ?
- How do we reinsert freed block ?
Knowing How Much to Free
- Standard method
- Keep the length of a block in the word preceding the block
- This word is often called the header field or header
- Requires an extra word for every allocated block
- Keep the length of a block in the word preceding the block
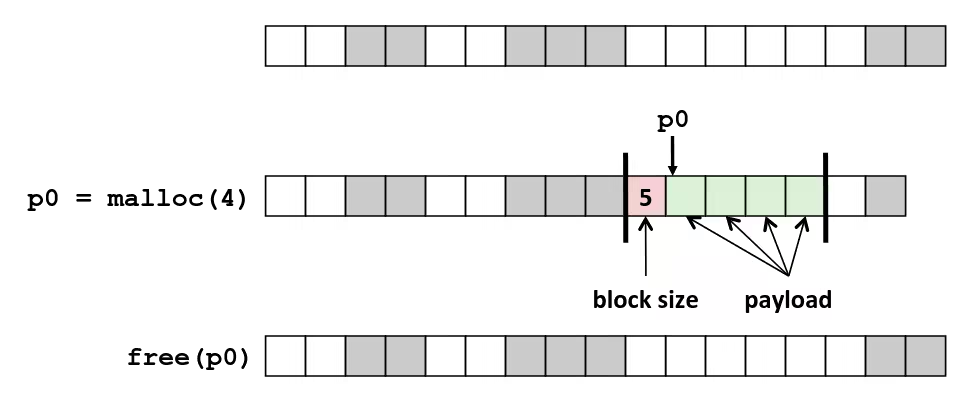
Keeping Track of Free Blocks
- Method 1: Implicit list using length-links all blocks

- Method 2: Explicit list among the free blocks using pointers

- Method 3: Segregated free list
- Different free lists for different size classes
- Method 4: Blocks sorted by size
- Can use a balanced tree (e.g. Red-Black tree) with pointers within each free block, and the length used as a key
Implicit List
- For each block we need both size and allocation status
- Could store this information in two words: wasteful !
- Standard trick
- If blocks are aligned, some low-order address bits are always 0
- Instead of storing an always-0 bit, use it as a allocated/free flag
- When reading size word, must mask out this bit
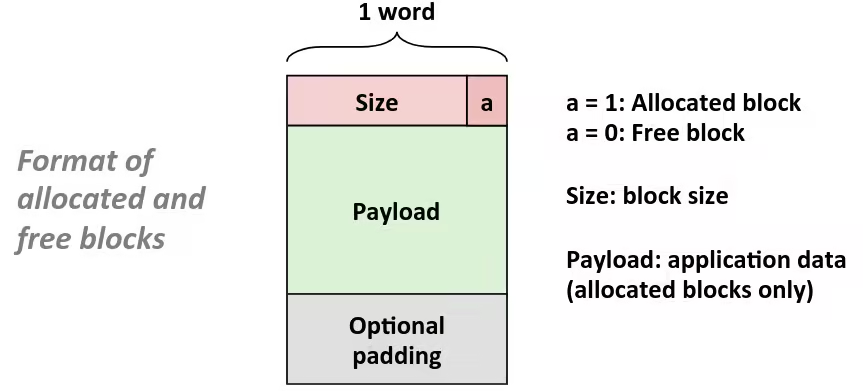
Detailed Implicit Free List Example
- Payload must be double-word aligned
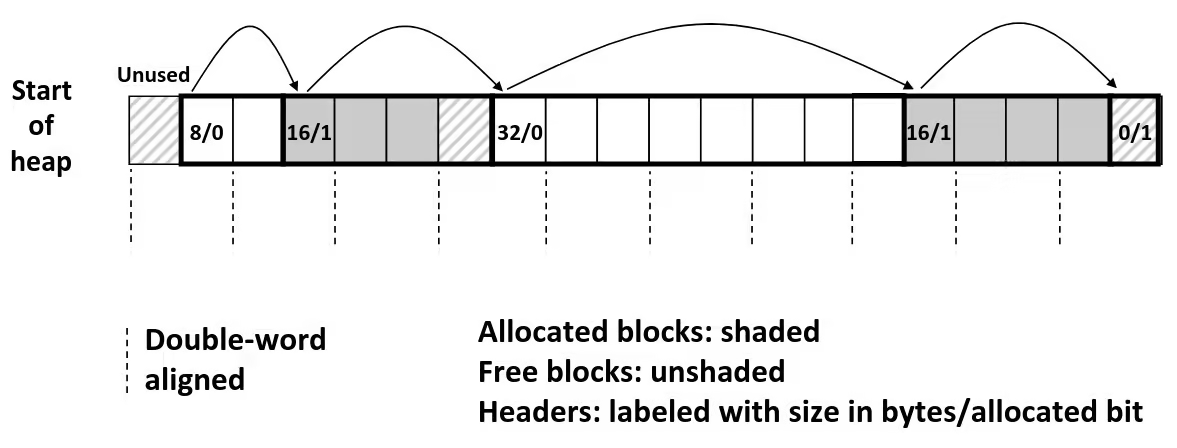
- We have an internal fragmentation in first allocated block because of payload is only 2 words but allocated 4 words
Finding a Free Block
- First fit
- Search list from beginning, choose first free block that fits:
p = start;while ((p < end) && // not passed end ((*p & 1) || // already allocated (*p <= len))) // too small p = p + (*p & -2); // goto next block (word addressed)- Can take linear time in total number of blocks (allocated and free)
- In practice it can cause “splinters” at beginning of list
- Next fit
- Like first fit, but search list starting where previous search finished
- Should often be faster than first fit: avoids re-scanning unhelpful blocks
- Some research suggests that fragmentation is worse
- Best fit
- Search the list, choose the best free block: fits, with fewest bytes left over
- Keeps fragments small — usually improves memory utilization
- Will typically run slower than first fit
Allocating in Free Block
- Splitting
- Since allocated space might be smaller than free space, we might want to split the block
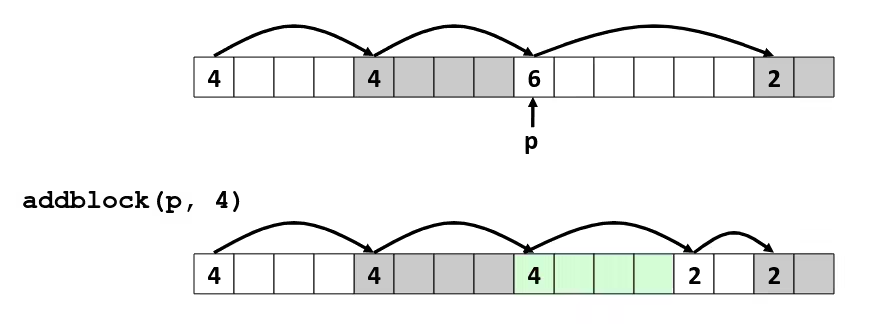
void addblock(ptr p, int len) { int newsize = ((len + 1) >> 1) << 1; // round up to even int oldsize = *p & -2; // mask out low bit *p = newsize | 1; // set new length if (newsize < oldsize) *(p+newsize) = oldsize - newsize; // set length in remaining}Freeing a Block
- Simplest implementation
- Need only clear the allocated flag
void free_block(ptr p) { *p = *p & -2 }
- But can lead to “false fragmentation”
- Need only clear the allocated flag
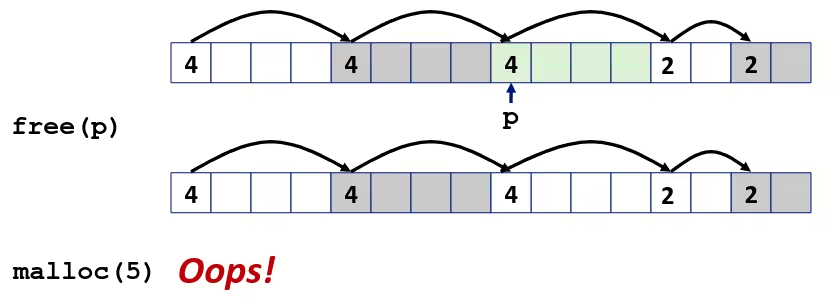
- There is enough free space, but the allocator won’t be able to find it
Coalescing
- Join (coalesce) with next/previous blocks, if they are free
- Coalescing with next block
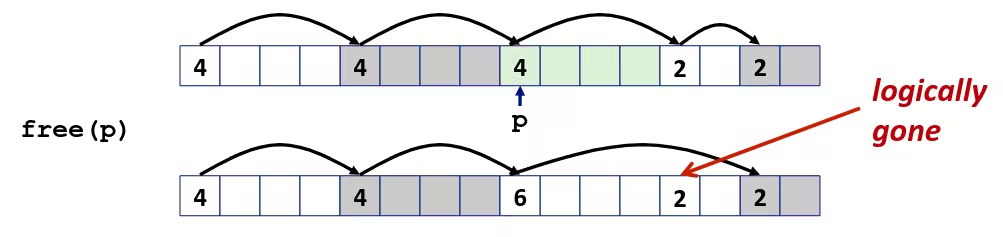
void free_block(ptr p) { *p = *p & -2; // clear allocated flag next = p + *p; // find next block if ((*next & 1) == 0) *p = *p + *next; // add to this block if} // not allocated- But how do we coalesce with previous block ?
Bidirectional Coalescing
- Boundary tags [Knuth73]
- Replicate size/allocated word at “bottom” (end) of free blocks
- Allows us to traverse the “list” backwards, but requires extra space
- Important and general technique !
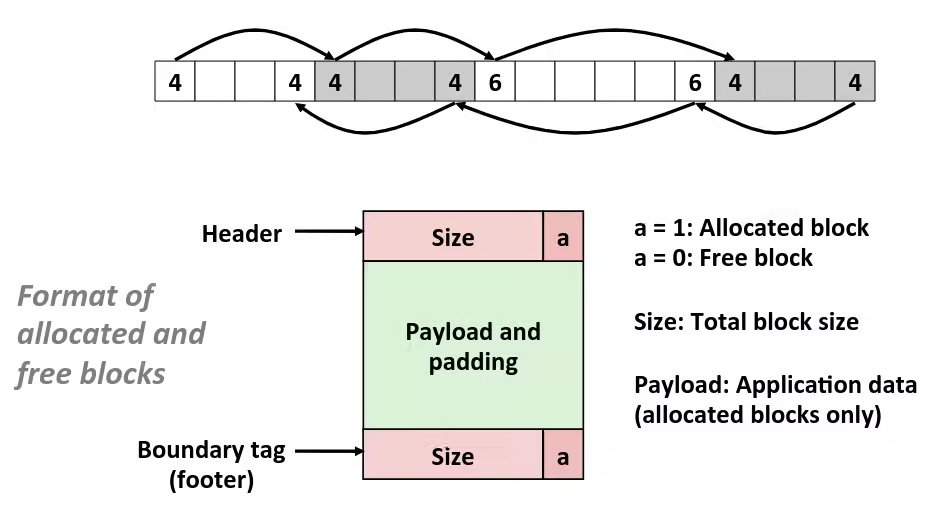
Constant Time Coalescing
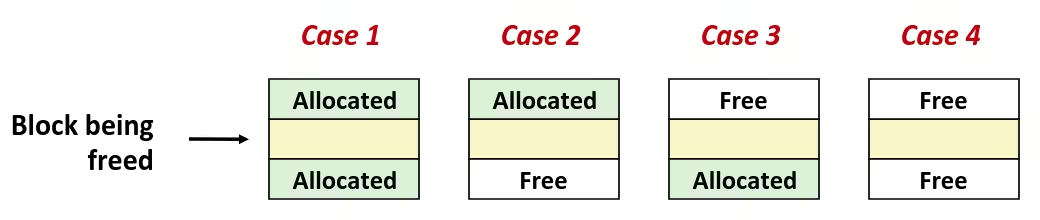
Case 1
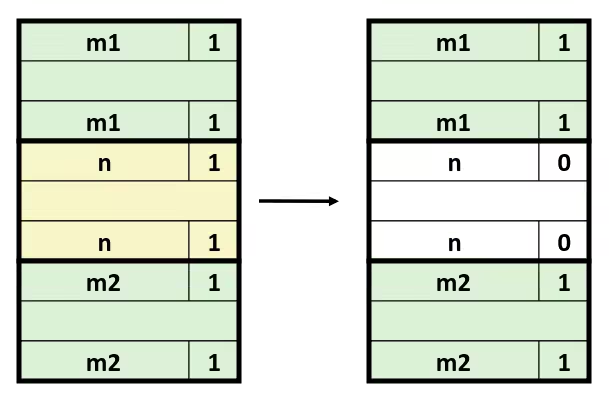
Case 2
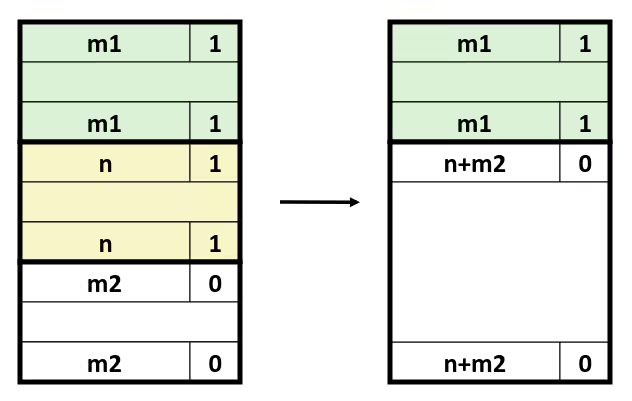
Case 3
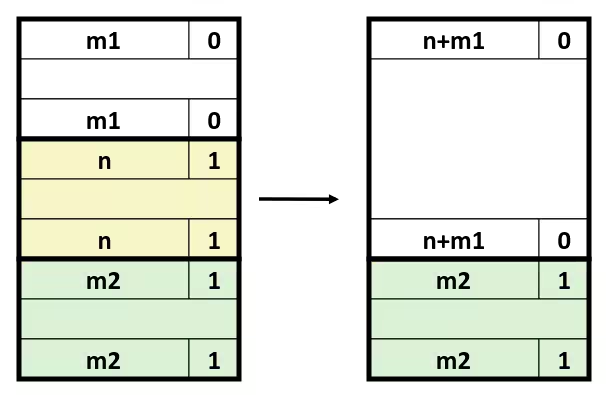
Case 4
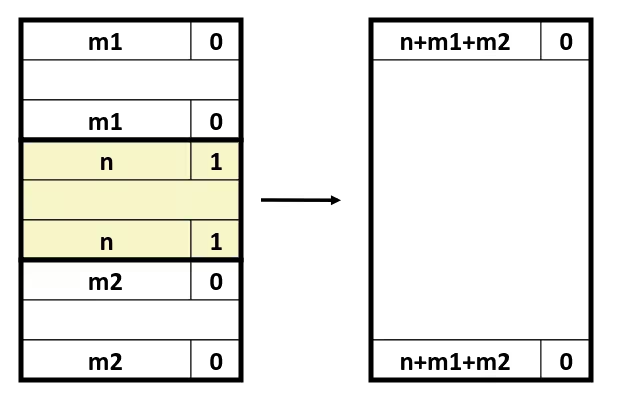
Disadvantages of Boundary Tags
- Internal fragmentation
- malloc’d blocks don’t need the footer tag
Implicit Lists Summary
- Implementation: very simple
- Allocate cost:
- Linear time worst case
- Free cost:
- Constant time worst case
- Even with coalescing
- Memory usage:
- Will depend on placement policy
- First-fit, next-fit or best-fit
- Not used in practice for malloc/free because of linear-time allocation
- Used in many special purpose applications
- However, the concepts of splitting and boundary tag coalescing are general to all allocators
Explicit List
Explicit Free Lists
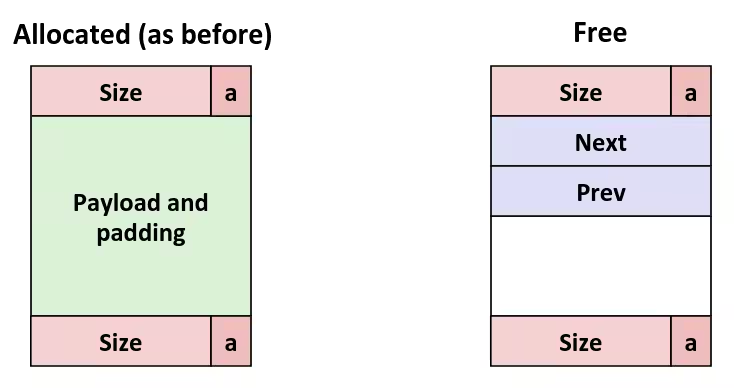
-
Maintain list(s) of free blocks, not all blocks
- The “next” free block could be anywhere
- So we need to store forward/back pointers, not just sizes
- Still need boundary tags for coalescing
- Luckily we track only free blocks, so we can use payload area
- The “next” free block could be anywhere
-
Logically

- Physically
- Blocks can be in any order
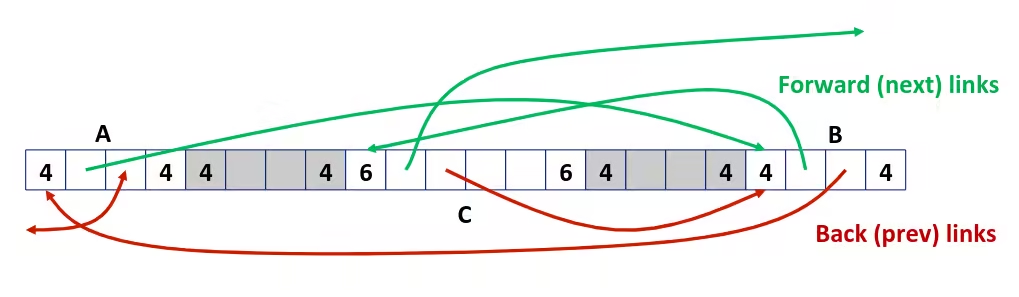
Allocating From Explicit Free Lists
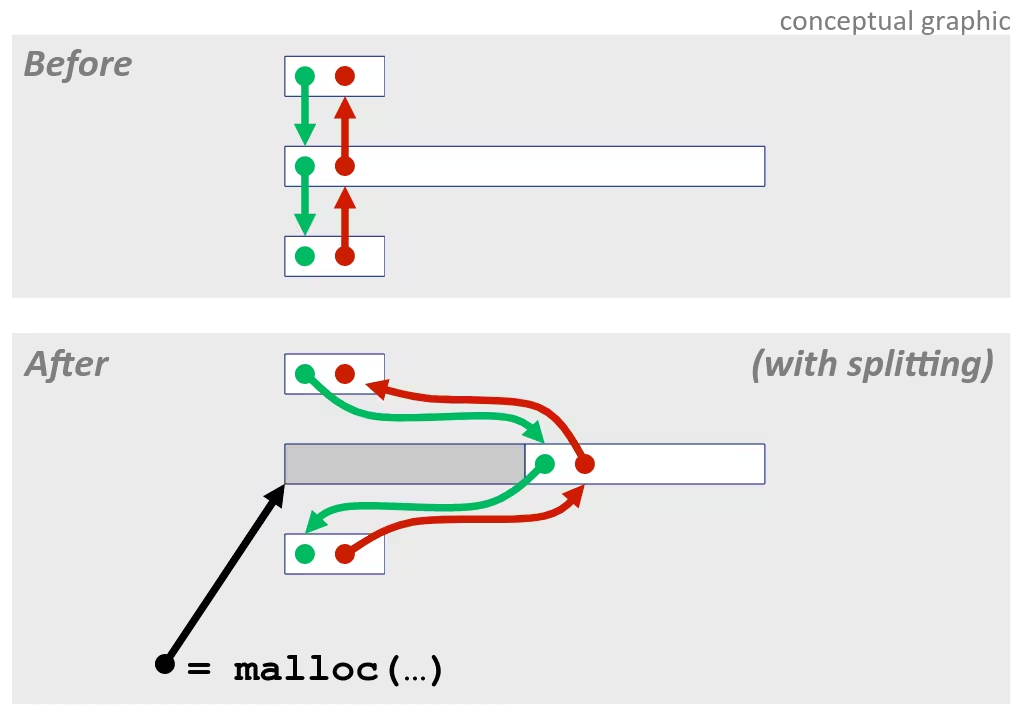
Freeing With Explicit Free Lists
- Insertion policy
- LIFO (last-in-first-out) policy
- Insert freed block at the beginning of the free list
- Pro: Simple and constant time
- Con: Studies suggest fragmentation is worse than address ordered
- Address-ordered policy
- Insert freed blocks so that free list blocks are always in address order: addr(prev) < addr(curr) < addr(next)
- Pro: Studies suggest fragmentation is lower than LIFO
- Con: Requires search
- LIFO (last-in-first-out) policy
Freeing With a LIFO Policy (Case 1)
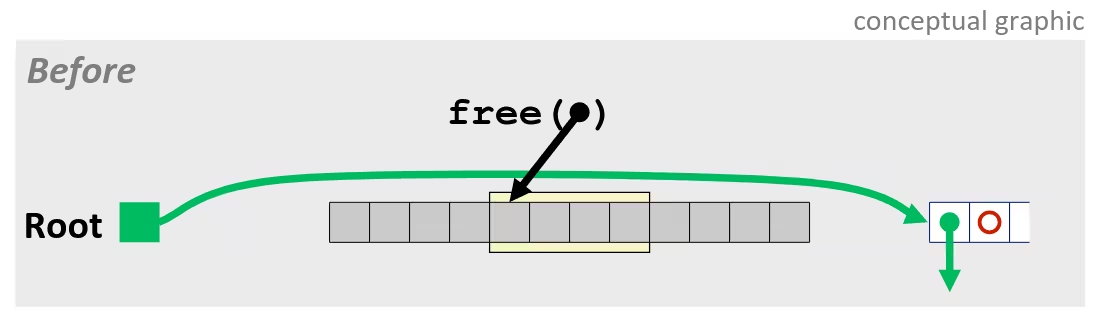
- Insert the freed block at the root of the list
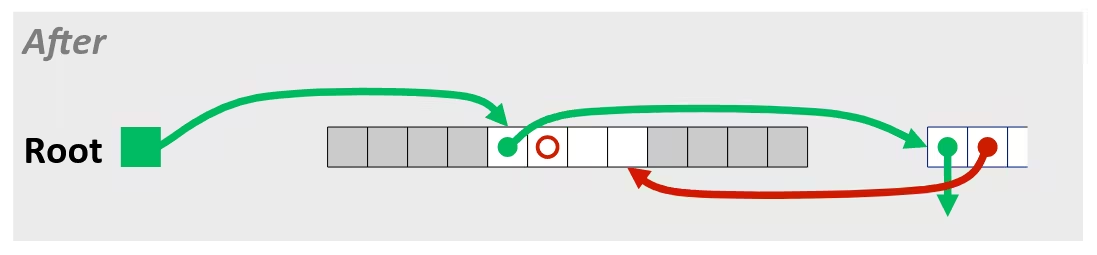
Freeing With a LIFO Policy (Case 2)
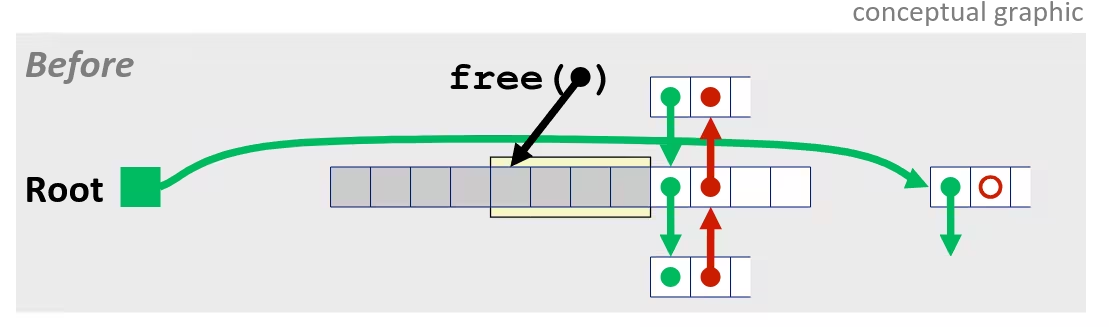
- Splice out successor block, coalesce both memory blocks and insert the new block at the root of the list
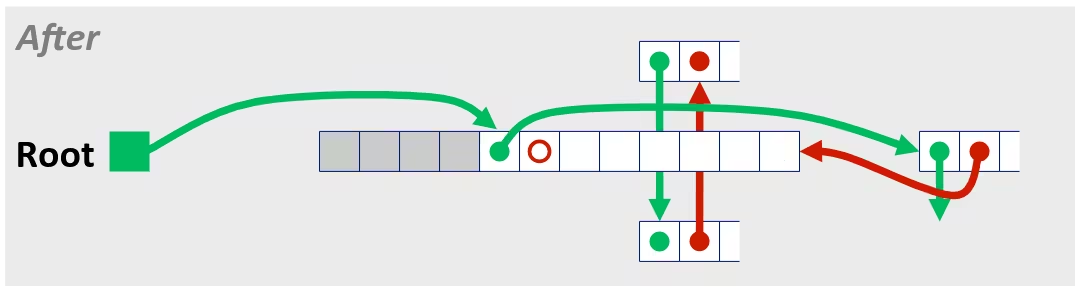
Freeing With a LIFO Policy (Case 3)
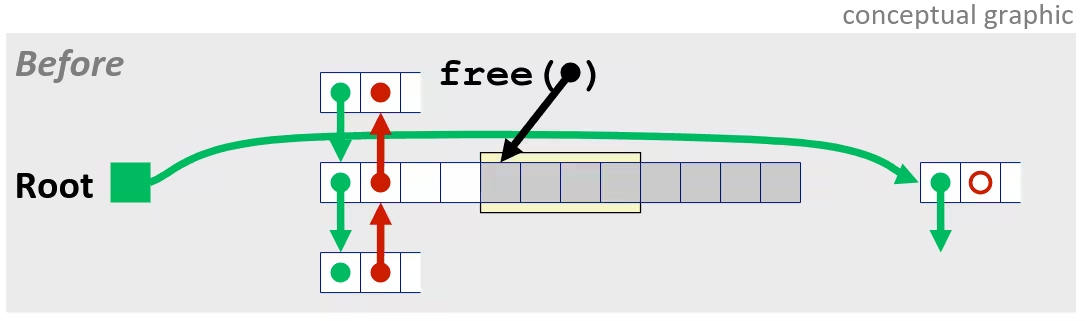
- Splice out predecessor block, coalesce both memory blocks, and insert the new block at the root of the list
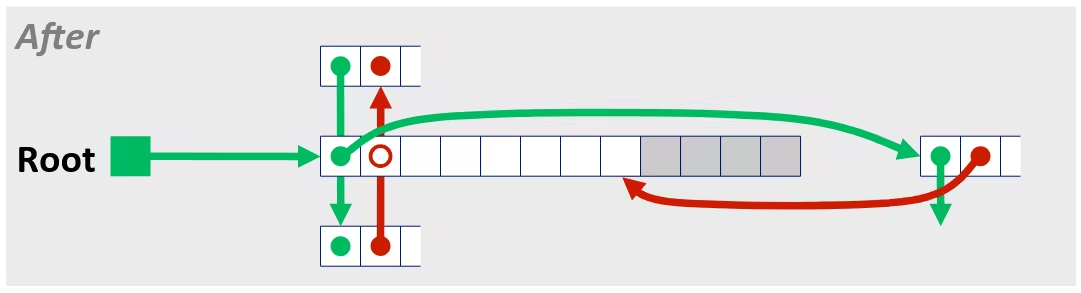
Freeing With a LIFO Policy (Case 4)
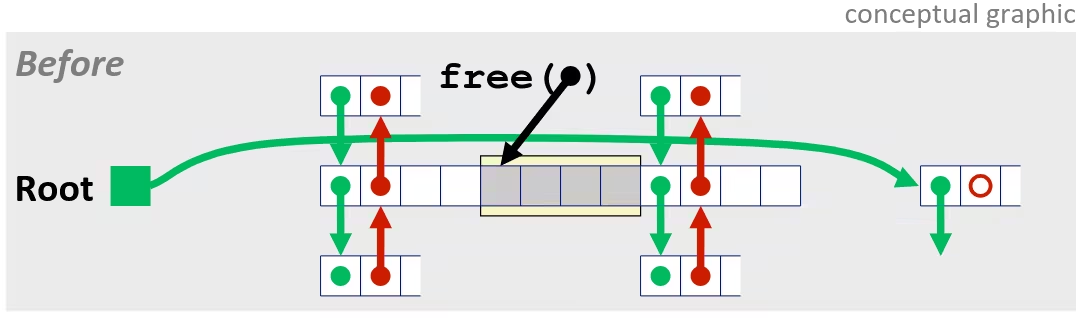
- Splice out predecessor and successor blocks, coalesce all 3 memory blocks and insert the new block at the root of the list
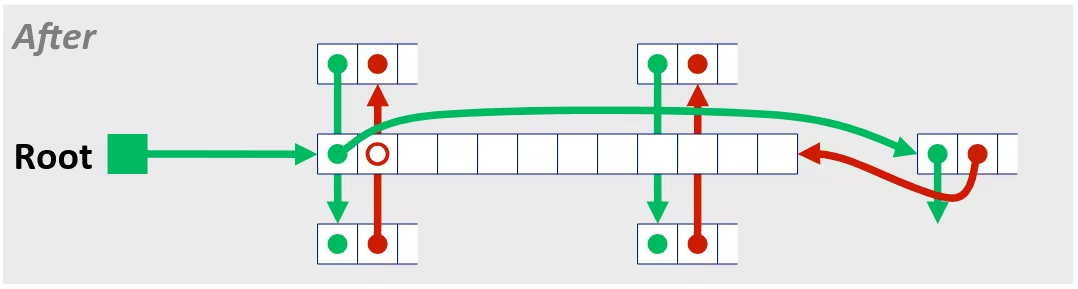
Explicit List Summary
- Comparison to implicit list:
- Allocate is linear time in number of free blocks instead of all blocks
- Much faster when most of the memory is full
- Slightly more complicated allocate and free since needs to splice blocks in and out of the list
- Some extra space for the links (2 extra words needed for each block)
- Allocate is linear time in number of free blocks instead of all blocks
- Most common use of linked lists is in conjunction with segregated free lists
- Keep multiple linked lists of different size classes, or possibly for different types of objects
Segregated Free List
- Each size class of blocks has its own free list
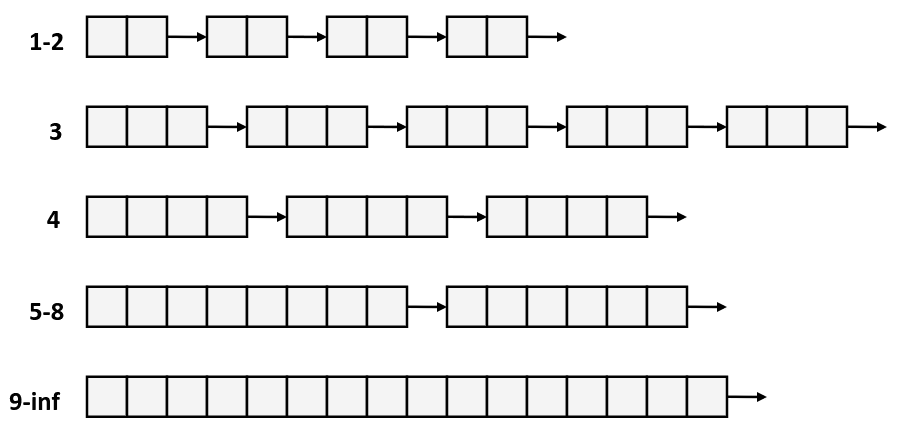
- Often have separate classes for each small size
- For larger sizes: One class for each two-power size
Seglist Allocator
- Given an array of free lists, each one for some size class
- To allocate a block of size n:
- Search appropriate free list for block of size m > n
- If an appropriate block is found:
- Split block and place fragment on appropriate list (optional)
- If no block is found, try next larger class
- Repeat until block is found
- If no block is found:
- Request additional heap memory from OS (using
sbrk()) - Allocate block of n bytes from this new memory
- Place remainder as a single free block in largest size class
- Request additional heap memory from OS (using
- To free a block:
- Coalesce and place on appropriate list
- Advantages of seglist allocators
- Higher throughput
- log time for power-of-two size classes
- Better memory utilization
- First-fit search of segregated free list approximates a best-fit search of entire heap
- Extreme case: Giving each block its own size class is equivalent to best-fit
- Higher throughput
Summary of Key Allocator Policies
- Placement policy
- First-fit, next-fit, best-fit, etc
- Trades off lower throughput for less fragmentation
- Interesting observation: segregated free lists
- Approximate a best fit placement policy without having to search entire free list
- Splitting policy
- When do we go ahead and split free blocks ?
- How much internal fragmentation are we willing to tolerate ?
- Coalescing policy
- Immediate coalescing: Coalesce each time free is called
- Deferred coalescing: Try to improve performance of free by deferring coalescing until needed. Examples:
- Coalesce as you scan the free list for malloc
- Coalesce when the amount of external fragmentation reaches some threshold
Garbage Collection
- Automatic reclamation of heap-allocated storage — application never has to free
void foo() { int *p = malloc(128); return; /* p block is now garbage */}-
Common in many dynamic languages:
- Python, Ruby, Java, Perl, ML, Lisp, Mathematica
-
Variants (“conservative” garbage collectors) exist for C and C++
- However, cannot necessarily collect all garbage
-
How does the memory manager know when memory can be freed ?
- In general we cannot know what is going to be used in the future since it depends on conditionals
- But we can tell that certain blocks cannot be used if there are no pointers to them
-
Must make certain assumptions about pointers
- Memory manager can distinguish pointers from non-pointers
- All pointers point to the start of a block
- Cannot hide pointers (e.g., by coercing them to an int, and then back again)
Classical GC Algorithms
- Mark-and-sweep collection (McCarthy, 1960)
- Does not move blocks (unless you also “compact”)
- Reference counting (Collins, 1960)
- Does not move blocks
- Copying collection (Minsky, 1963)
- Moves blocks
- Generational Collectors (Lieberman and Hewitt, 1983)
- Collection based on lifetimes
- Most allocations become garbage very soon
- So focus reclamation work on zones of memory recently allocated
- Collection based on lifetimes
Memory as a Graph
- We view memory as a directed graph
- Each block is a node in the graph
- Each pointer is an edge in the graph
- Locations not in the heap that contain pointers into the heap are called root nodes (e.g. registers, locations on the stack, global variables)
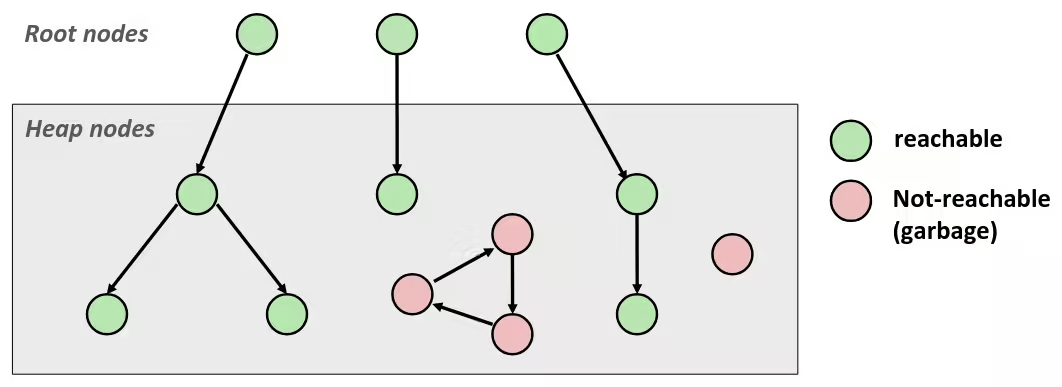
- A node (block) is reachable if there is a path from any root to that node
- Non-reachable nodes are garbage (cannot be needed by the application)
Mark and Sweep Collecting
- Can build on top of malloc/free package
- Allocate using malloc until you “run out of space”
- When out of space:
- Use extra mark bit in the head of each block
- Mark: Start at roots and set mark bit on each reachable block
- Sweep: Scan all blocks and free blocks that are not marked
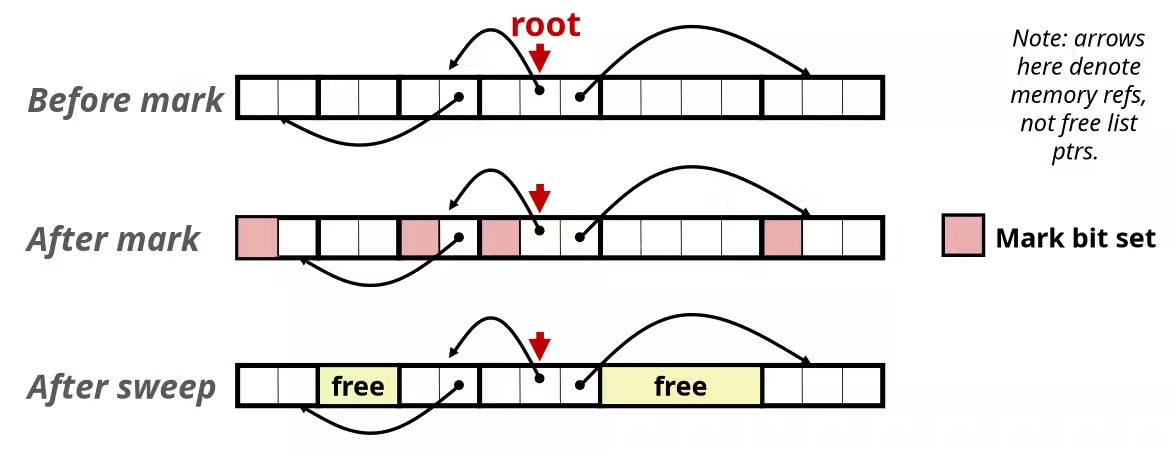
Assumptions For a Simple Implementation
- Application
new(n): returns pointer to new block with all locations clearedread(b, i): read locationiof blockbinto registerwrite(b, i, v): writevinto locationiof blockb
- Each block will have a header word
- Addressed as
b[-1], for a blockb - Used for different purposes in different collectors
- Addressed as
- Instructions used by the Garbage Collector
is_ptr(p): determines whetherpis a pointerlength(b): returns the length of blockb, not including the headerget_roots(): returns all the roots
Example
- Mark using depth-first traversal of the memory graph
ptr mark(ptr p) { if (!is_ptr(p)) return; // do nothing if not pointer if (markBitSet(p)) return; // check if already marked setMarkBit(p); // set the mark bit for (i=0; i < length(p); i++) // call mark on all words mark(p[i]); // in the block return;}- Sweep using lengths to find next block
ptr sweep(ptr p, ptr end) { while (p < end) { if markBitSet(p) clearMarkBit(); else if (allocateBitSet(p)) free(p); p += length(p);}Conservative Mark & Sweep in C
- A “conservative garbage collector” for C programs
is_ptr()determines if a word is a pointer by checking if it points to an allocated block of memory- But, in C pointers can point to the middle of a block
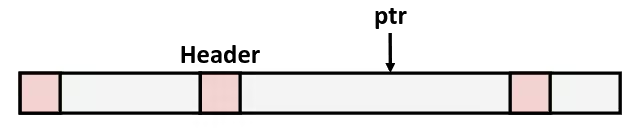
- So how to find the beginning of the block ?
- Can use a balanced binary tree to keep track of all allocated blocks (key is start-of-block)
- Balanced-tree pointers can be stored in header (use two additional words)
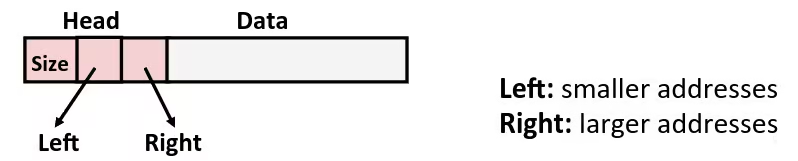
System-Level I/O
Unix I/O
- A Linux file is a sequence of m bytes
- All I/O devices are represented as files
- Even the kernel is represented as a file
/boot/vmlinuz-3.13.0-55-generic: kernel image/proc: kernel data structures
File Types
- Each file has a type indicating its role in the system
- Regular file: Contains arbitrary data
- Directory: Index for a related group of files
- Socket: For communicating with a process on another machine
- And more file types…
- Named pipes (FIFOs)
- Symbolic links
- Character and block devices
- …
Regular Files
- A regular file contains arbitrary data
- Applications open distinguish between text files and binary files
- Text files are regular files with only ASCII or Unicode characters
- Binary files are everything else
- e.g., object files, JPEG images
- Kernel doesn’t know the difference !
- Text file is sequence of text lines
- Text line is sequence of chars terminated by newline char
\n- Newline is
0x0a, same as ASCII line feed character LF
- Newline is
- Text line is sequence of chars terminated by newline char
- End Of Line (EOL) indicators in different systems:
- Linux and Mac OS:
\n(0x0a)- Line Feed (LF)
- Windows and Internet protocols:
\r\n(0x0d0x0a)- Carriage return (CR) followed by line feed (LF)
- Linux and Mac OS:
Directories
- Directory consists of an array of links
- Each link maps a filename to a file
- Each directory contains at least two entries
.(dot) is a link to itself..(dot dot) is a link to the parent directory
Directory Hierarchy
- All files are organized as a hierarchy anchored by root directory named
/(slash) - Kernel maintains current working directory (cwd) for each process
Opening Files
- Opening a file informs the kernel that you are getting ready to access that file
int fd; /* file descriptor */
if ((fd = open("/etc/hosts", O_RDONLY)) < 0) { perror("open"); exit(1);}- Returns a small identifying integer file descriptor
fd == -1indicates that an error occurred
- Each process created by a linux shell begins life with three open files associated with a terminal:
0: standard input (stdin)1: standard output (stdout)2: standard error (stderr)
Closing Files
- Closing a file informs the kernel that you are finished accessing that file
int fd; /* file descriptor */int retval; /* return value */
if ((retval = close(fd)) < 0) { perror("close"); exit(1);}- Closing an already closed file is a recipe for disaster in threaded programs
- Moral: Always check return codes, even for seemingly benign functions such as
close()
Reading Files
- Reading a file copies bytes from the current file position to memory, and then updates file position
char buf[512];int fd; /* file descriptor */int nbytes; /* number of bytes read */
/* Open file fd ... *//* Then read up to 512 bytes from file fd */if ((nbytes = read(fd, buf, sizeof(buf))) < 0) { perror("read"); exit(1);}- Returns number of bytes read from file fd into buf
Writing Files
- Writing a file copies bytes from memory to the current file position, and then updates current file position
char buf[512];int fd; /* file descriptor */int nbytes; /* number of bytes read */
/* Open the file fd ... *//* Then write up to 512 bytes from buf to file fd */if ((nbytes = write(fd, buf, sizeof(buf)) < 0) { perror("write"); exit(1);}- Returns number of bytes written from buf to file fd
Short Counts
- Short counts can occur in these situations:
- Encountering (end-of-file) EOF on reads
- Reading text lines from a terminal
- Reading and writing network sockets
- Short counts never occur in these situations:
- Reading from disk files (except for EOF)
- Writing to disk files
- Best practice is to always allow for short counts
ssize_t readn(int fd, void *buf, size_t size) { char *ptr = buf; size_t nleft = size; ssize_t nread;
while (nleft > 0) { nread = read(fd, ptr, nleft);
if (nread < 0) return -1; // error if (nread == 0) break; // EOF
nleft -= nread; ptr += nread; }
return (size - nleft);}Buffered I/O
Motivation
- Applications open read/write one character at a time
- Read line of text one character at a time, stopping at newline
- Implementing as Unix I/O calls expensive
readandwriterequire Unix kernel calls- clock cycles
- Solution: Buffered read
- Use Unix read to grab block of bytes
- User input functions take one byte at a time from buffer
- Refill buffer when empty

Example
- Goal: Copying
stdintostdout, one byte at a time
Without builtin buffer
int main() { char c; while (read(STDIN_FILENO, &c, sizeof(char))) write(STDOUT_FILENO, &c, sizeof(char));
return 0;}- To many
readsystem calls, wasteful !
With builtin buffer
#define BUFFER_SIZE 1024
ssize_t buffered_getchar(int fd, char *c) { static char buf[BUFFER_SIZE]; static size_t size = 0; static size_t pos = 0;
if (pos >= size) { size = read(fd, buf, BUFFER_SIZE);
if (size <= 0) { return -1; // EOF or error } pos = 0; } *c = buf[pos++];
return 1; // success got 1 character}- Only one
readsystem call.
Metadata, Sharing, and Redirection
File Metadata
- Metadata is data about data, in this case file data
- Per-file metadata maintained by kernel
- Accessed by users with the
statandfstatfunctions
- Accessed by users with the
/* Metadata returned by the stat and fstat functions */struct stat { dev_t st_dev; /* Device */ ino_t st_ino; /* inode */ mode_t st_mode; /* Protection and file type */ nlink_t st_nlink; /* Number of hard links */ uid_t st_uid; /* User ID of owner */ gid_t st_gid; /* Group ID of owner */ dev_t st_rdev; /* Device type (if inode device) */ off_t st_size; /* Total size, in bytes */ unsigned long st_blksize; /* Blocksize for filesystem I/O */ unsigned long st_blocks; /* Number of blocks allocated */ time_t st_atime; /* Time of last access */ time_t st_mtime; /* Time of last modification */ time_t st_ctime; /* Time of last change */};Example of Accessing Metadata
int main(int argc, char **argv) { struct stat file_stat; char *type, *readok;
stat(argv[1], &file_stat);
if (S_ISREG(file_stat.st_mode)) /* Determine file type */ type = "regular"; else if (S_ISDIR(file_stat.st_mode)) type = "directory"; else type = "other"; if ((file_stat.st_mode & S_IRUSR)) /* Check read access */ readok = "yes"; else readok = "no";
printf("type: %s, read: %s\n", type, readok); exit(0);}Represents Open Files
- Two descriptors referencing two distinct open files. Descriptor 1 (stdout) points to terminal, and descriptor 4 points to open disk file
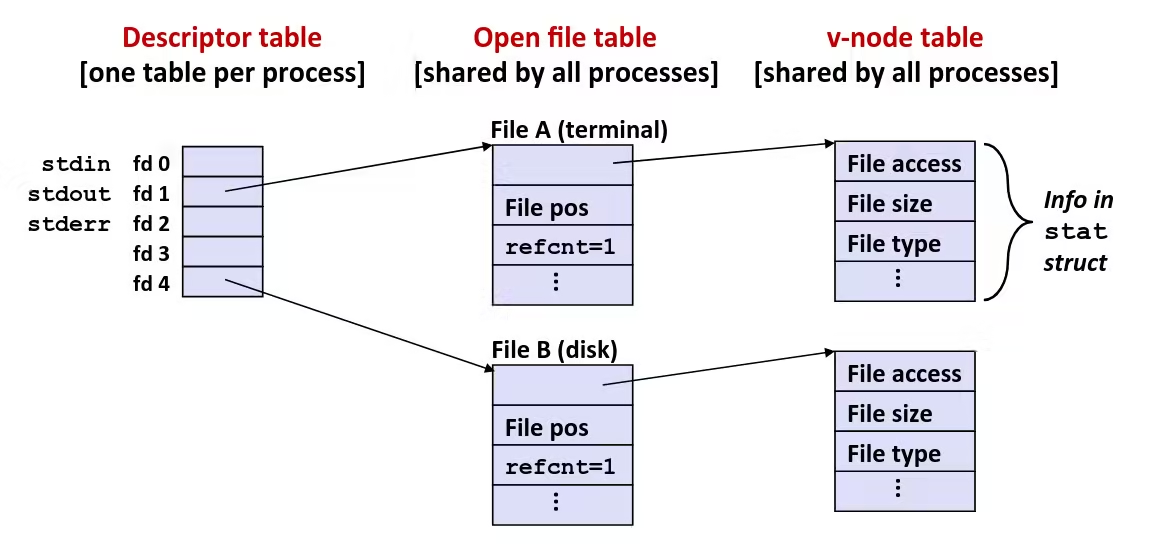
File Sharing
- Two distinct descriptors sharing the same disk file through two distinct open file table entries
- E.g., Calling open twice with the same filename argument
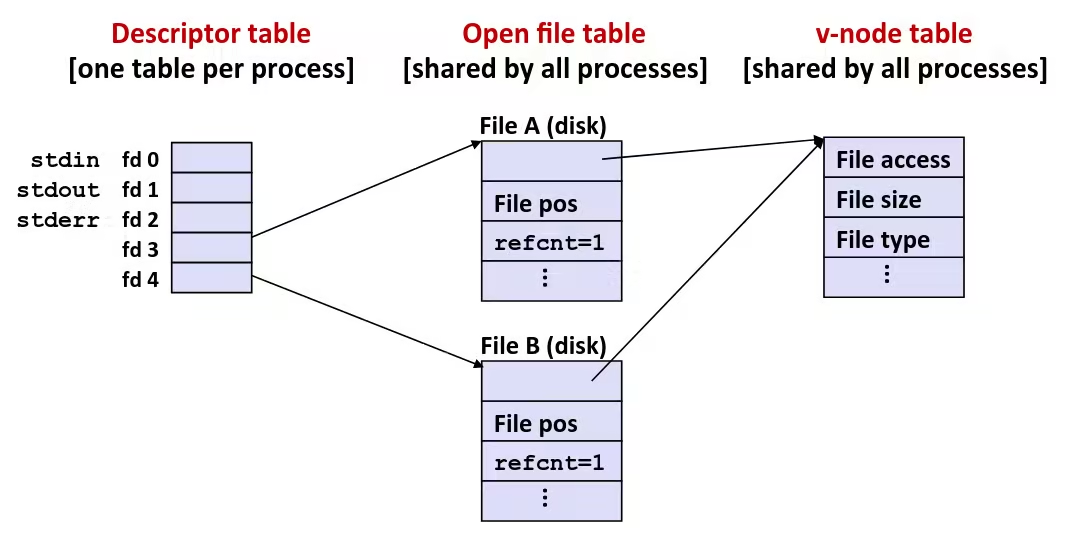
Processes Share Files: fork
- A child process inherits its parent’s open files
- Note: situation unchanged by exec functions (use
fcntlto change)
- Note: situation unchanged by exec functions (use
Before fork call:
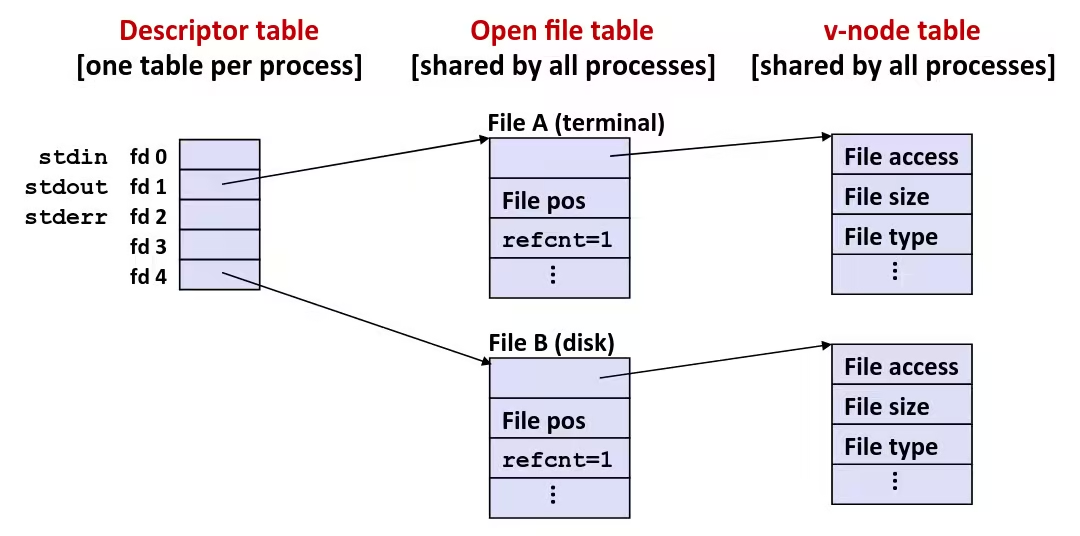
After fork call:
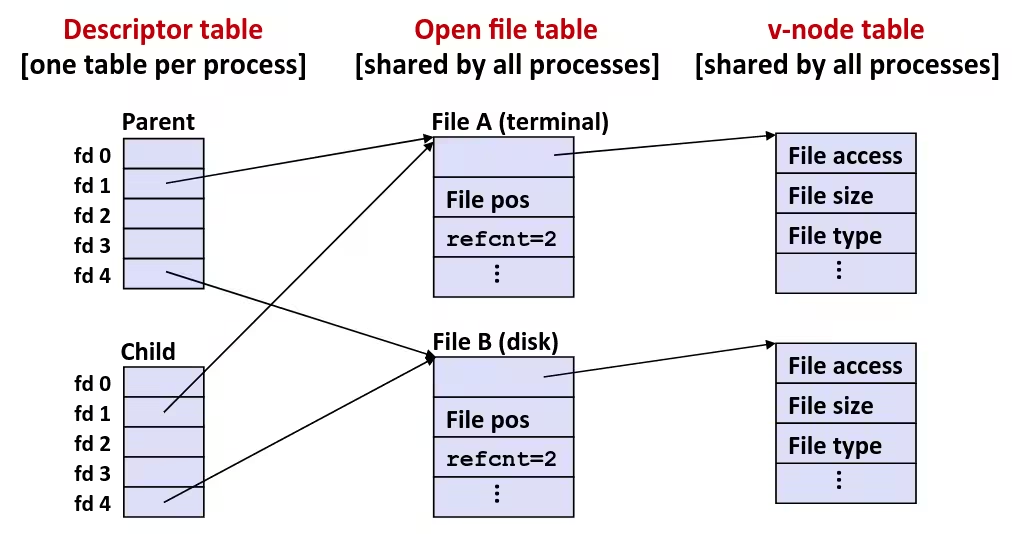
- Child’s table same as parent’s, and +1 to each refcnt
I/O Redirection
dup2(oldfd, newfd)- Copies (per-process) descriptor table entry
oldfdto entrynewfd
- Copies (per-process) descriptor table entry
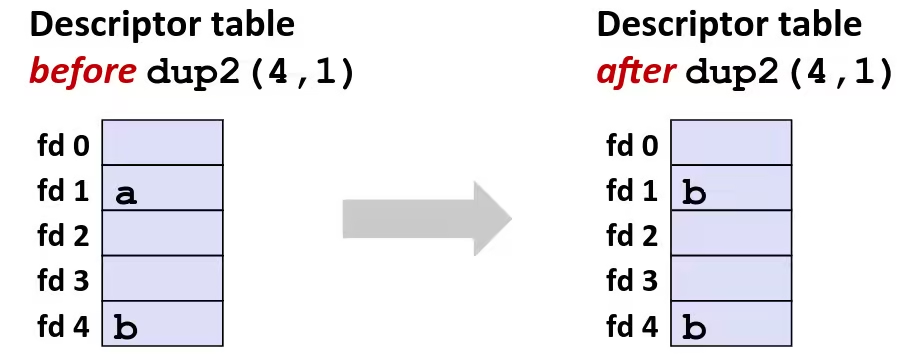
Example
- Open file to which stdout should be redirected
- Happens in child executing shell code, before
exec
- Happens in child executing shell code, before
- Call
dup2(4,1)- Cause fd=1 (stdout) to refer to disk file pointed at by fd=4
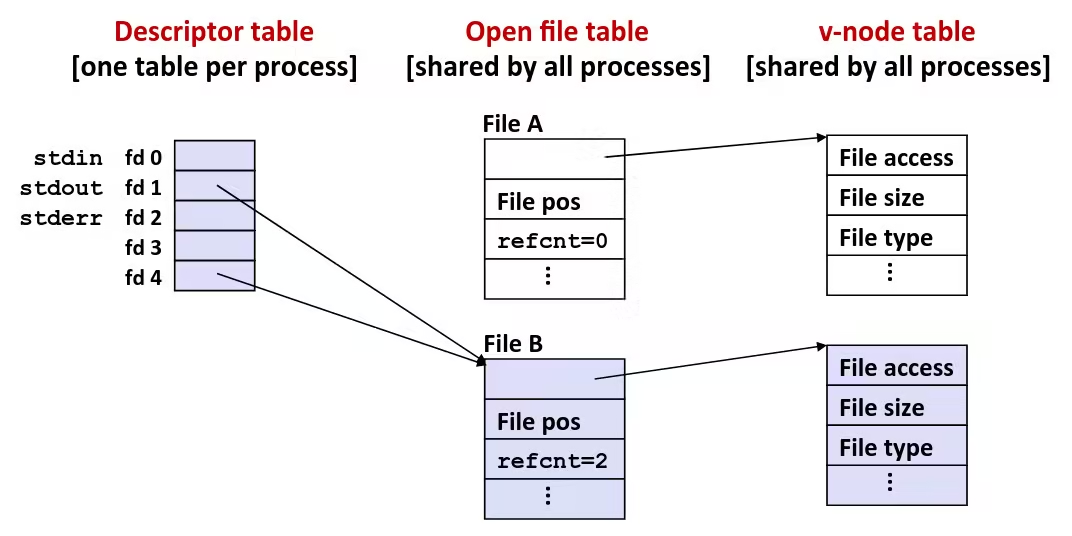
Standard I/O
Standard I/O Streams
- Standard I/O models open files as streams
- Abstraction for a file descriptor and a buffer in memory
- C programs begin life with three open streams (defined in
stdio.h)stdin: standard inputstdout: standard outputstderr: standard error
#include <stdio.h>
extern FILE *stdin; /* standard input (descriptor 0) */extern FILE *stdout; /* standard output (descriptor 1) */extern FILE *stderr; /* standard error (descriptor 2) */
int main() { fprintf(stdout, "Hello, world\n");}Buffering in Standard I/O
- Standard I/O functions use buffered I/O
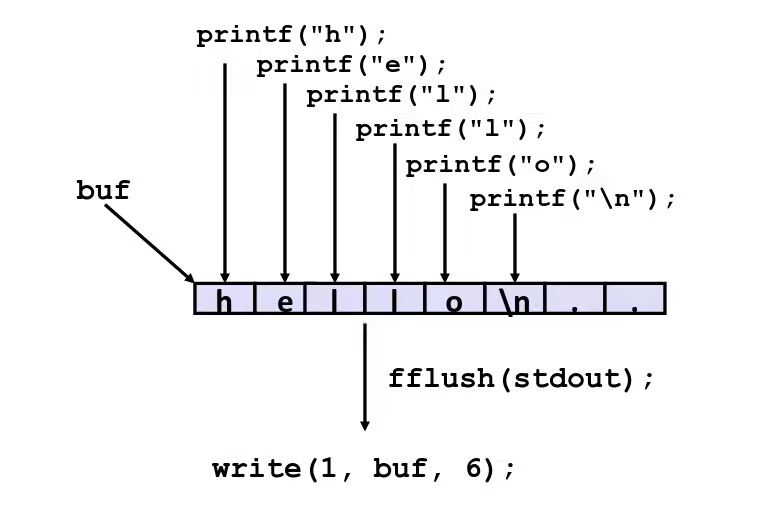
int main() { printf("h"); printf("e"); printf("l"); printf("l"); printf("o"); printf("\n"); fflush(stdout); exit(0);}- Buffer flushed to output fd on
\n, call tofflushorexit, orreturnfrom main
Network Programming
A Client-Server Transaction
- Most network applications are based on the client-server model:
- A server process and one or more client processes
- Server manages some resources
- Server provides service by manipulating resource for clients
- Server activated by request from client (vending machine analogy)
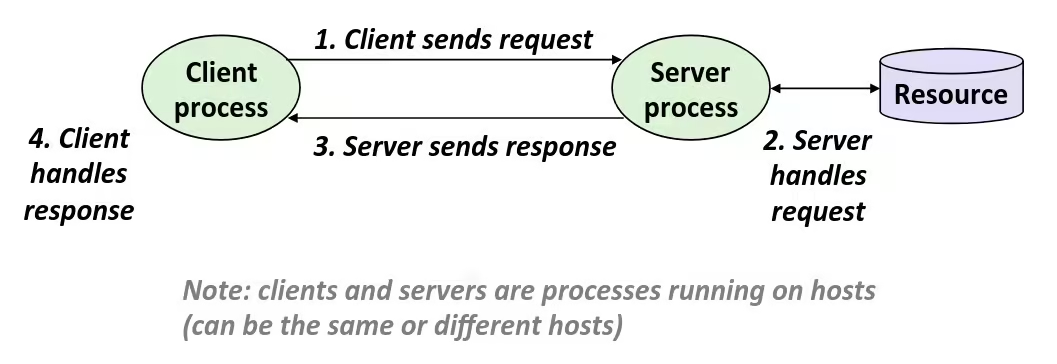
Hardware Organization of a Network Host
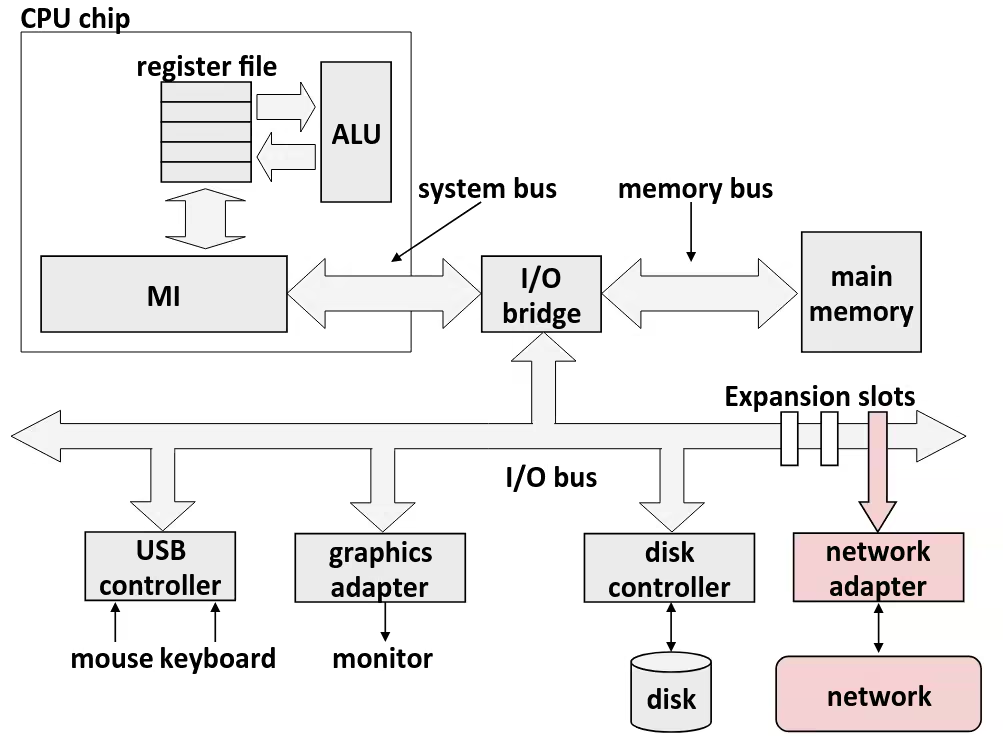
Computer Networks
- A network is a hierarchical system of boxes and wires organized by geographical proximity
- SAN (System Area Network) spans cluster or machine room
- Switched Ethernet, Quadrics QSW, …
- LAN (Local Area Network) spans a building or campus
- Ethernet is most prominent example
- WAN (Wide Area Network) spans country or world
- Typically high-speed point-to-point phone lines
- SAN (System Area Network) spans cluster or machine room
- An internetwork (internet) is an interconnected set of networks
- The Global IP Internet (uppercase “I”) is the most famous example of an internet (lowercase “i”)
Lowest Level: Ethernet Segment
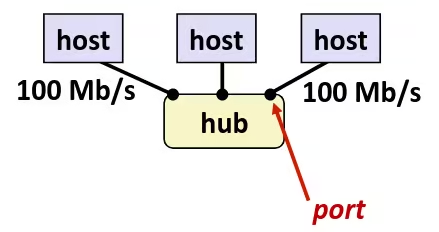
- Ethernet segment consists of a collection of hosts connected by wires (twisted pairs) to a hub
- Spans room or floor in a building
- Operation
- Each Ethernet adapter has a unique 48-bit address (MAC address)
- E.g.,
00:16:ea:e3:54:e6
- E.g.,
- Hosts send bits to any other host in chunks called frames
- Hub slavishly copies each bit from each port to every other port
- Every host sees every bit
- Note: Hubs are on their way out. Bridges (switches, routers) became cheap enough to replace them
- Each Ethernet adapter has a unique 48-bit address (MAC address)
Next Level: Bridged Ethernet Segment
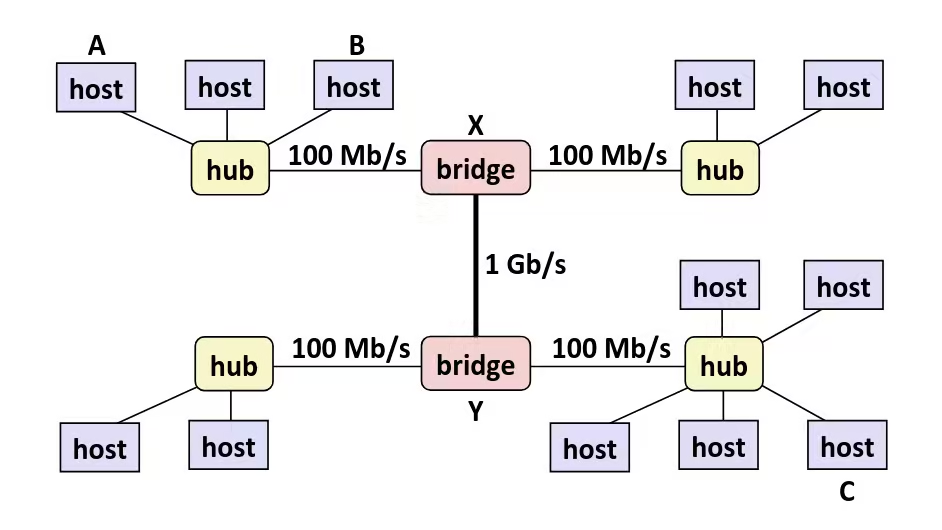
- Spans building or campus
- Bridges cleverly learn which hosts are reachable from which ports and then selectively copy frames from port to port
Conceptual View of LANs
- For simplicity, hubs, bridges, and wires are often shown as a collection of hosts attached to a single wire:
Next Level: internets (lower case)
- Multiple incompatible LANs can be physically connected by specialized computers called routers
- The connected networks are called an internet (lower case)
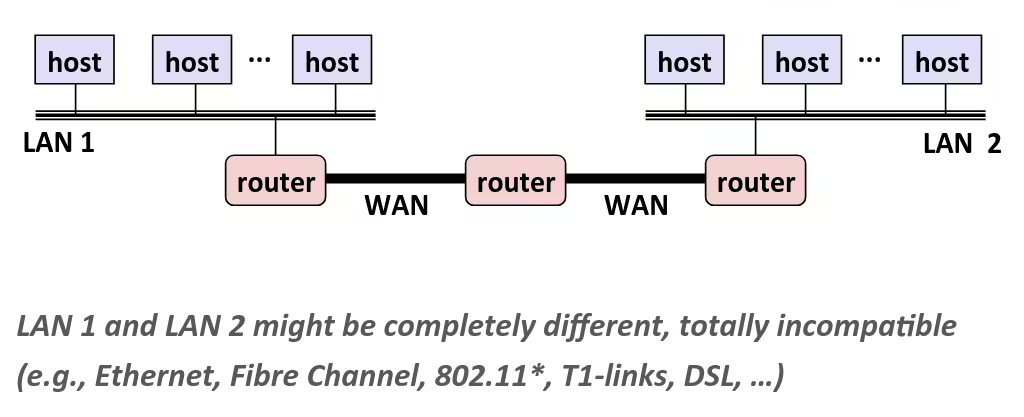
Logical Structure of an internet
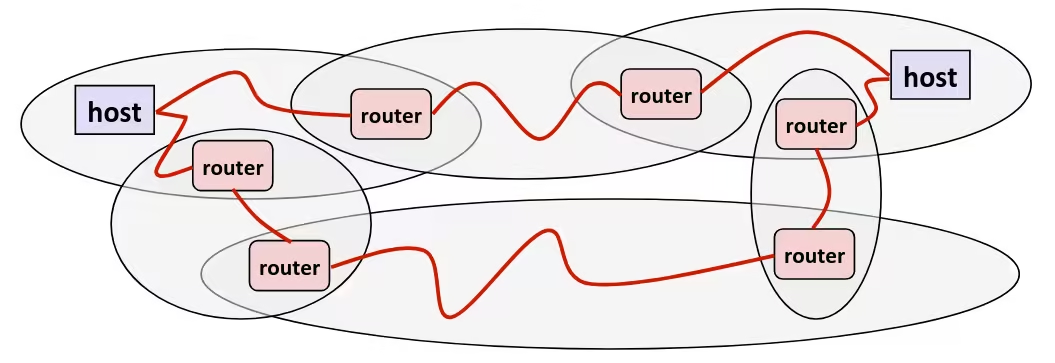
- Ad hoc interconnection of networks
- No particular topology
- Vastly different router & link capacities
- Send packets from source to destination by hopping through networks
- Router forms bridge from one network to another
- Different packets may take different routes
The Notion of an internet Protocol
- How is it possible to send bits across incompatible LANs and WANs ?
- Solution: protocol software running on each host and router
- Protocol is a set of rules that governs how hosts and routers should cooperate when they transfer data from network to network
- Smooths out the differences between the different networks
What Does an internet Protocol Do ?
- Provides a naming scheme
- An internet protocol defines a uniform format for host addresses
- Each host (and router) is assigned at least one of these internet addresses that uniquely identifies it
- Provides a delivery mechanism
- An internet protocol defines a standard transfer unit (packet)
- Packet consists of header and payload
- Header: contains info such as packet size, source and destination addresses
- Payload: contains data bits sent from source host
Transferring internet Data Via Encapsulation
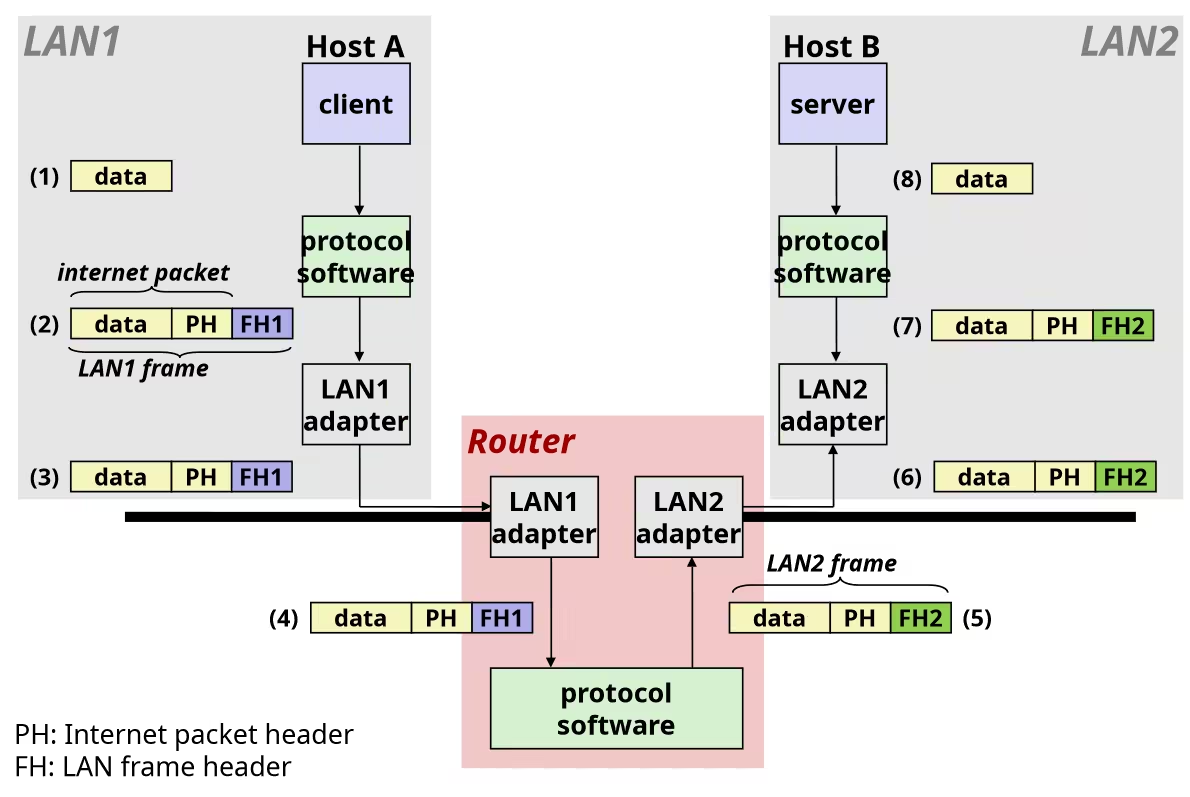
Other Issues
- We are glossing over a number of important questions:
- What if different networks have different maximum frame sizes ? (segmentation)
- How do routers know where to forward frames ?
- How are routers informed when the network topology changes ?
- What if packets get lost ?
- These (and other) questions are addressed by the area of systems known as computer networking
Global IP Internet (upper case)
- Most famous example of an internet
- Based on the TCP/IP protocol family
- IP (Internet Protocol):
- Provides basic naming scheme and unreliable delivery capability of packets (datagrams) from host-to-host
- UDP (Unreliable Datagram Protocol)
- Uses IP to provide unreliable datagram delivery from process-to-process
- TCP (Transmission Control Protocol)
- Uses IP to provide reliable byte streams from process-to-process over connections
- IP (Internet Protocol):
- Accessed via a mix of Unix file I/O and functions from the sockets interface
Hardware and Software Organization of an Internet Application
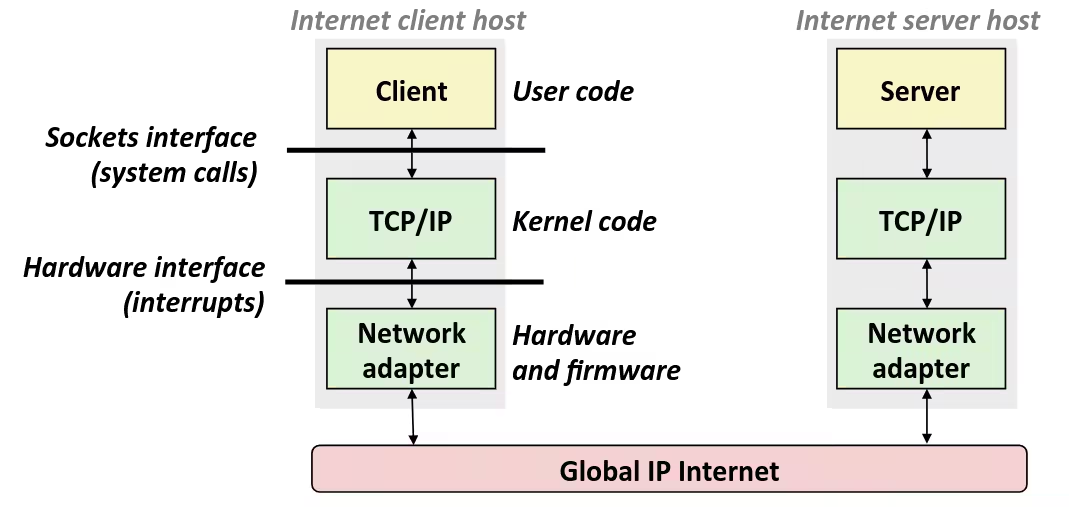
A Programmer’s View of the Internet
- Hosts are mapped to a set of 32-bit IP addresses
- The set of IP addresses is mapped to a set of identifiers called Internet domain names
- A process on one Internet host can communicate with a process on another Internet host over a connection
Aside: IPv4 and IPv6
- The original Internet Protocol, with its 32-bit addresses, is known as Internet Protocol Version 4 (IPv4)
- 1996: Internet Engineering Task Force (IETF) introduced Internet Protocol Version 6 (IPv6) with 128-bit addresses
- Intended as the successor to IPv4
IP Addresses
- 32-bit IP addresses are stored in an IP address struct
- IP addresses are always stored in memory in network byte order (big-endian byte order)
- True in general for any integer transferred in a packet header from one machine to another
- E.g., the port number used to identify an Internet connection
/* Internet address structure */struct in_addr { uint32_t s_addr; /* network byte order (big-endian) */};Dotted Decimal Notation
- By convention, each byte in a 32-bit IP address is represented by its decimal value and separated by a period
- IP address:
0x8002C2F2 = 128.2.194.242
- IP address:
- Use
getaddrinfoandgetnameinfofunctions to convert between IP addresses and dotted decimal format
IP Address Structure
- IP (V4) Address space divided into classes:
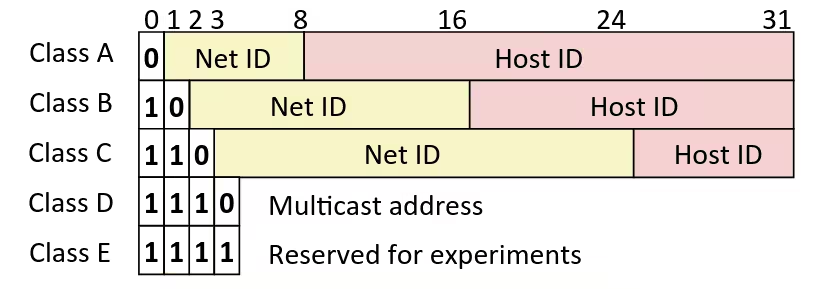
- Network ID Written in form
w.x.y.z/n- n = number of bits in network address (Net ID)
- E.g., CMU written as 128.2.0.0/16
- Class B address
- Unrouted (private) IP addresses:
10.0.0.0/8,172.16.0.0/12,192.168.0.0/16
Internet Domain Names
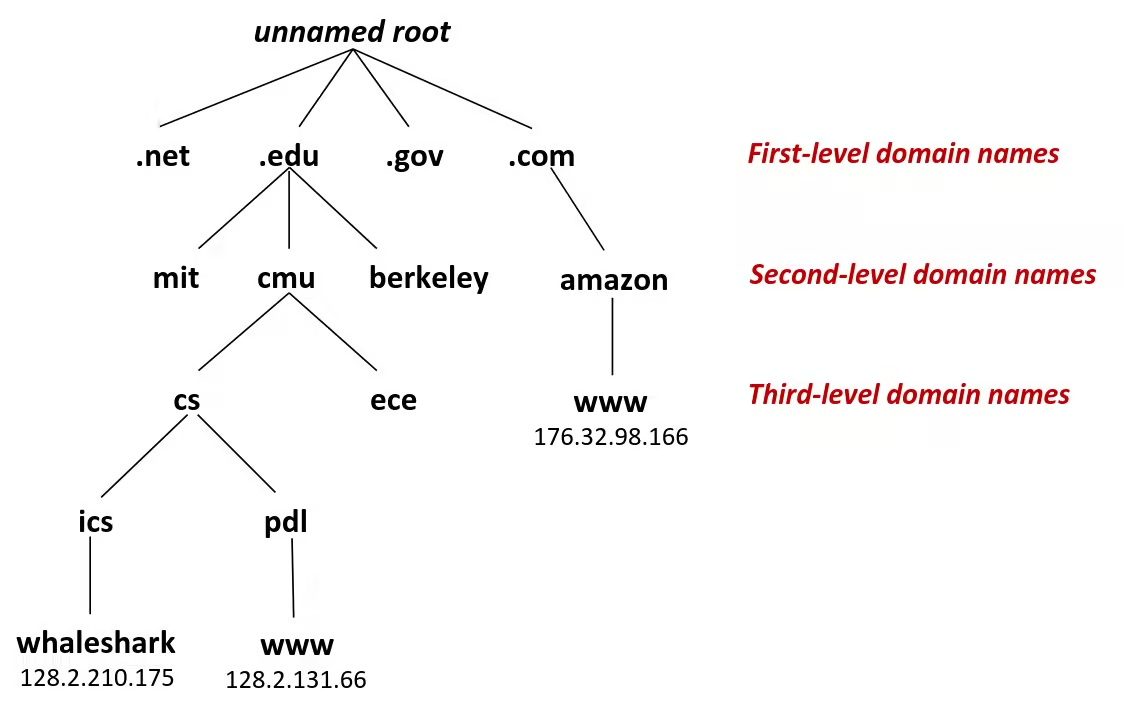
Domain Naming System (DNS)
- The Internet maintains a mapping between IP addresses and domain names in a huge worldwide distributed database called DNS
- Conceptually, programmers can view the DNS database as a collection of millions of host entries
- Each host entry defines the mapping between a set of domain names and IP addresses
- In a mathematical sense, a host entry is an equivalence class of domain names and IP addresses
Basic Internet Components
- Internet backbone
- Collection of routers (nationwide or worldwide) connected by high-speed point-to-point networks
- Internet Exchange Points (IXP)
- Router that connects multiple backbones (often referred to as peers)
- Also called Network Access Points (NAP)
- Regional networks
- Smaller backbones that cover smaller geographical areas (e.g., cities or states)
- Point of presence (POP)
- Machine that is connected to the Internet
- Internet Service Providers (ISPs)
- Provide dial-‐up or direct access to POPs
Internet Connection Hierarchy
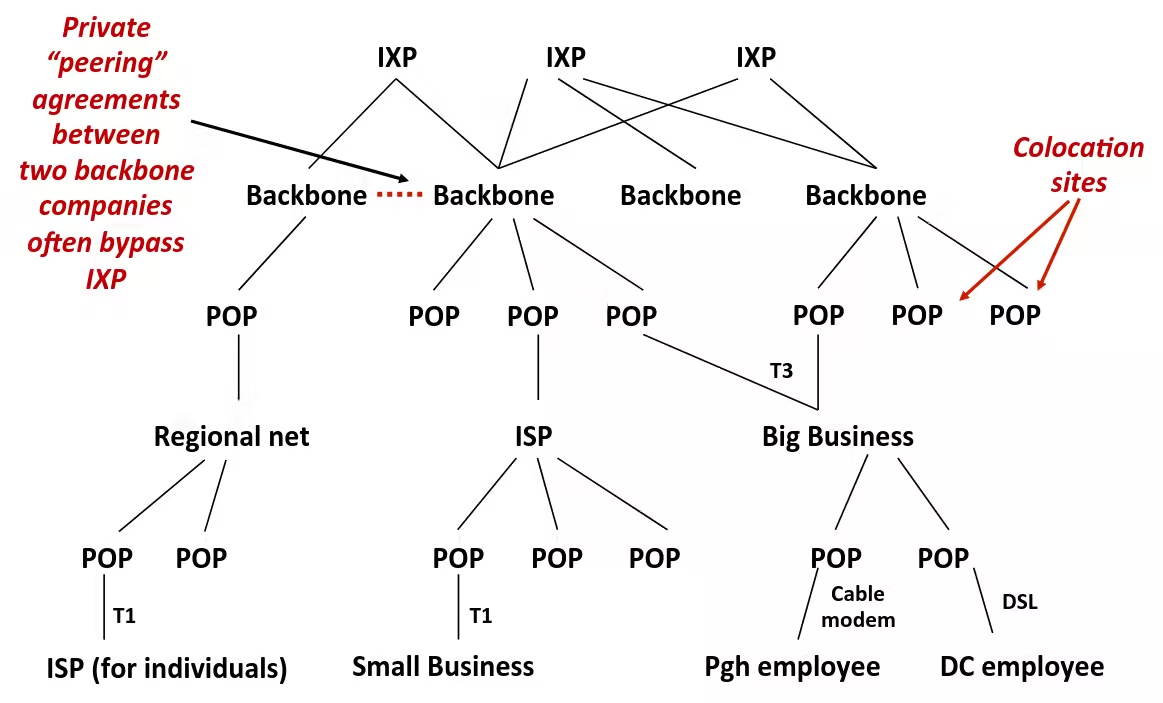
Internet Connections
- Clients and servers communicate by sending streams of bytes over connections. Each connection is:
- Point-to-point: connects a pair of processes
- Full-duplex: data can flow in both directions at the same time
- Reliable: stream of bytes sent by the source is eventually received by the destination in the same order it was sent
- A socket is an endpoint of a connection
- Socket address is an IPaddress:Port pair
- A port is a 16-bit integer that identifies a process:
- Ephemeral port: Assigned automatically by client kernel when client makes a connection request
- Well‐known port: Associated with some service provided by a server (e.g., port 80 is associated with Web servers)
Well-known Ports and Service Names
- Popular services have permanently assigned well-known ports and corresponding well-known service names:
- echo server: 7/echo
- ssh servers: 22/ssh
- email server: 25/smtp
- web servers: 80/http
- Mappings between well-known ports and service names is contained in the file
/etc/serviceson each Linux machine
Anatomy of a Connection
- A connection is uniquely identified by the socket addresses of its endpoints (socket pair)
- (cliaddr:cliport, servaddr:servport)
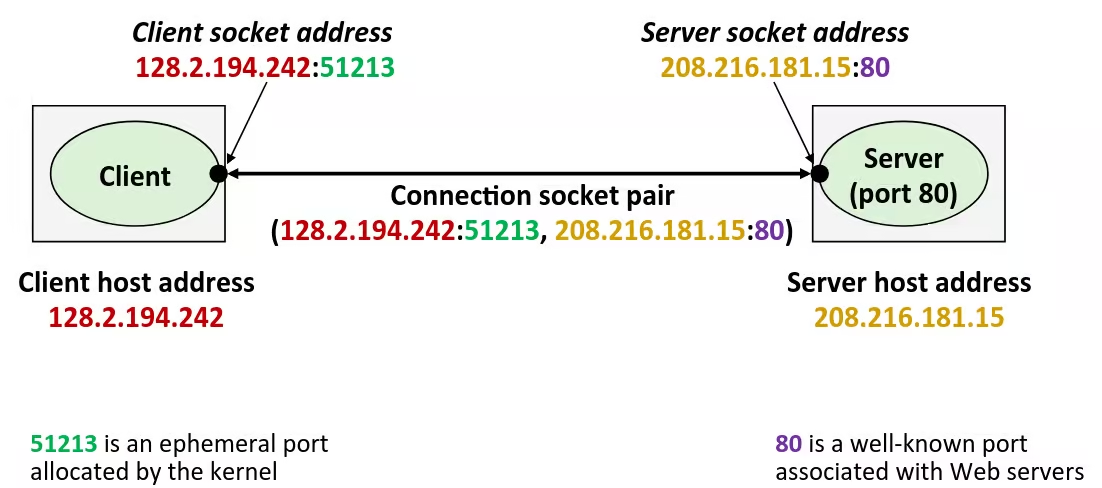
Using Ports to Identify Services
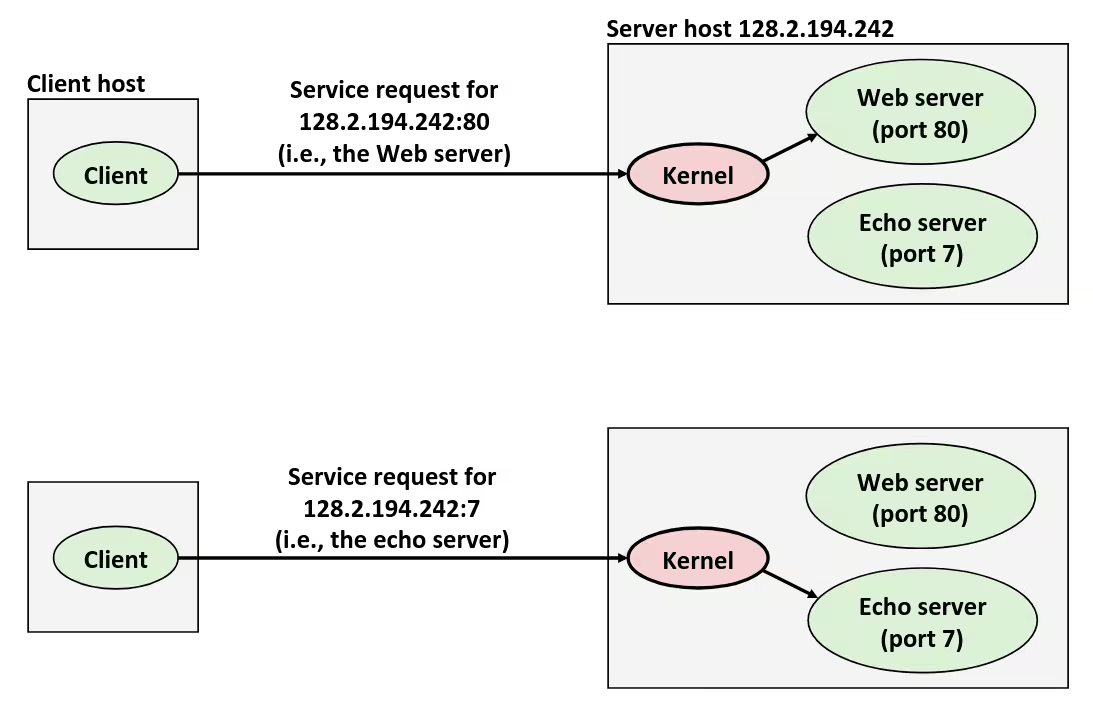
Sockets
- What is a socket ?
- To the kernel, a socket is an endpoint of communication
- To an application, a socket is a file descriptor that lets the application read/write from/to the network
- Remember: All Unix I/O devices, including networks, are modeled as files
- Clients and servers communicate with each other by reading from and writing to socket descriptors
- The main distinction between regular file I/O and socket I/O is how the application “opens” the socket descriptors
Socket Address Structures
- Generic socket address:
- For address arguments to
connect,bind, andaccept - Necessary only because C did not have generic (void *) pointers when the sockets interface was designed
- For casting convenience, we adopt the Stevens convention:
typedef struct sockaddr SA;
- For address arguments to
struct sockaddr { uint16_t sa_family; /* Protocol family */ char sa_data[14]; /* Address data */};
- Internet-specific socket address:
- Must cast (
struct sockaddr_in *) to (struct sockaddr *) for functions that take socket address arguments
- Must cast (
struct sockaddr_in { uint16_t sin_family; /* Protocol family (always AF_INET) */ uint16_t sin_port; /* Port num in network byte order */ struct in_addr sin_addr; /* IP addr in network byte order */ unsigned char sin_zero[8]; /* Pad to sizeof(struct sockaddr) */};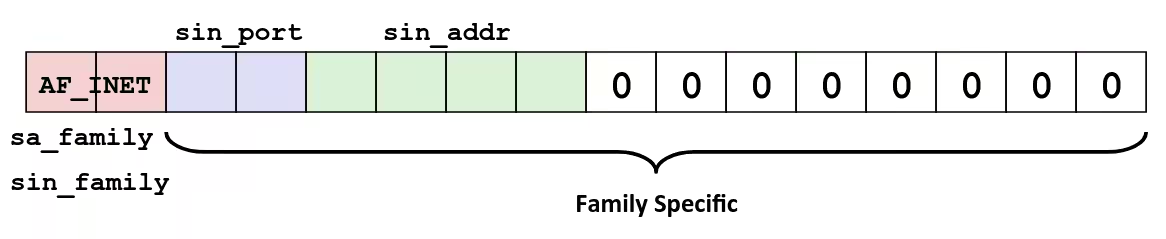
Sockets Interface
- Set of system-level functions used in conjunction with Unix I/O to build network applications
- Created in the early 80’s as part of the original Berkeley distribution of Unix that contained an early version of the Internet protocols
- Available on all modern systems
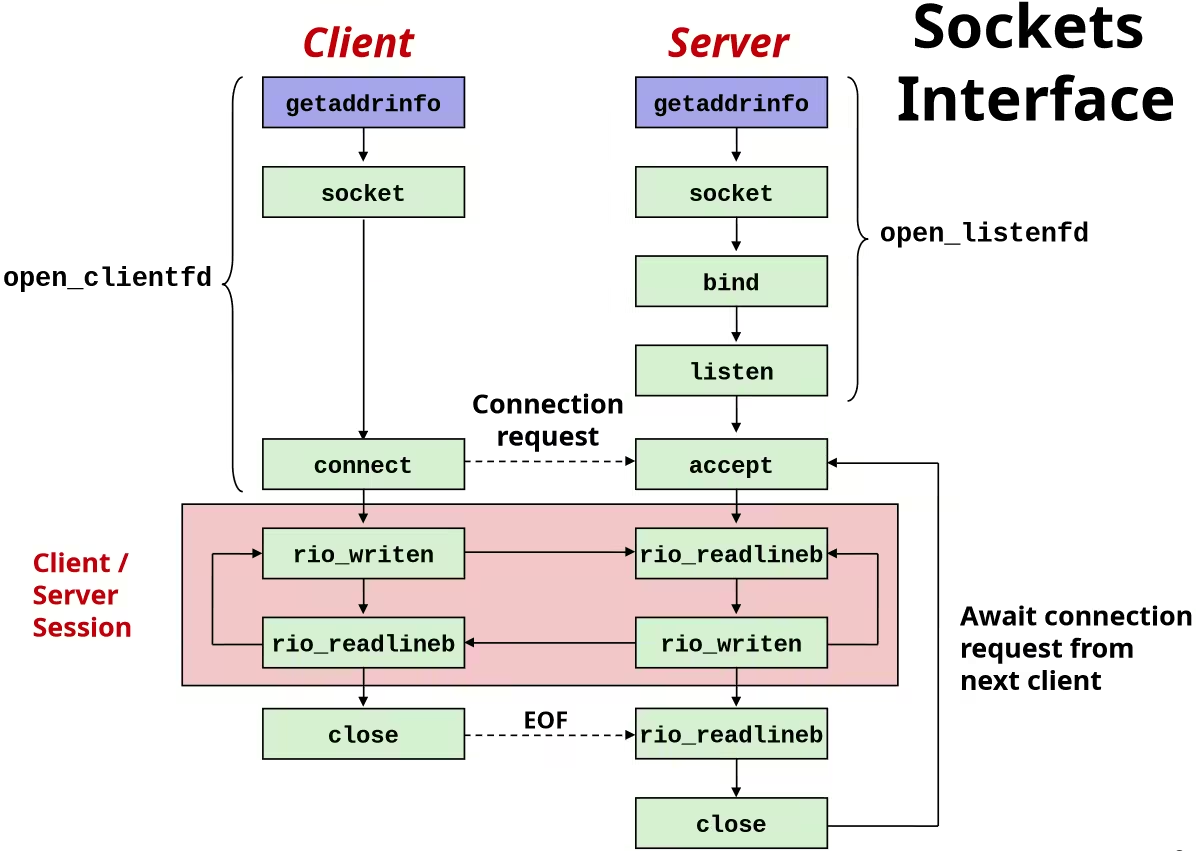
socket
- Clients and servers use the
socketfunction to create a socket descriptor:int socket(int domain, int type, int protocol) - Example:
int clientfd = socket(AF_INET, SOCK_STREAM, 0);
TIPProtocol specific ! Best practice is to use getaddrinfo to generate the parameters automatically, so that code is protocol independent.
bind
- A server uses bind to ask the kernel to associate the server’s socket address with a socket descriptor:
int bind(int sockfd, SA *addr, socklen_t addrlen); - The process can read bytes that arrive on the connection whose endpoint is addr by reading from descriptor sockfd
- Similarly, writes to sockfd are transferred along connection whose endpoint is addr
TIPBest practice is to use getaddrinfo to supply the arguments addr and addrlen.
listen
- By default, kernel assumes that descriptor from socket function is an active socket that will be on the client end of a connection
- A server calls the listen function to tell the kernel that a descriptor will be used by a server rather than a client:
int listen(int sockfd, int backlog); - Converts sockfd from an active socket to a listening (passive) socket that can accept connection requests from clients
- backlog is a hint about the number of outstanding connection requests that the kernel should queue up before starting to refuse requests
accept
- Servers wait for connection requests from clients by calling
accept:int accept(int listenfd, SA *addr, int *addrlen); - Waits for connection request to arrive on the connection bound to listenfd, then fills in client’s socket address in addr and size of the socket address in addrlen
- Returns a connected descriptor that can be used to communicate with the client via Unix I/O routines
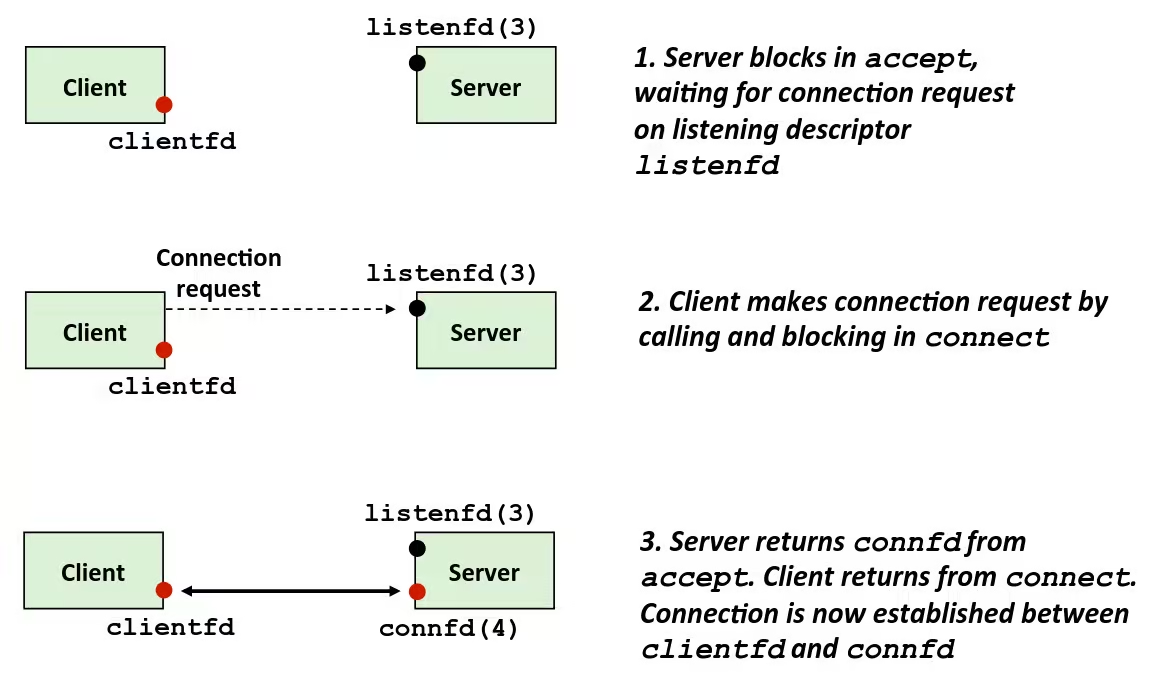
connect
- A client establishes a connection with a server by calling connect:
int connect(int clientfd, SA *addr, socklen_t addrlen); - Attempts to establish a connection with server at socket address addr
- If successful, then clientfd is now ready for reading and writing
- Resulting connection is characterized by socket pair
(x:y, addr.sin_addr:addr.sin_port)xis client addressyis ephemeral port that uniquely identifies client process on client host
TIPBest practice is to use getaddrinfo to supply the arguments addr and addrlen.
Connected vs. Listening Descriptors
- Listening descriptor
- End point for client connection requests
- Created once and exists for lifetime of the server
- Connected descriptor
- End point of the connection between client and server
- A new descriptor is created each time the server accepts a connection request from a client
- Exists only as long as it takes to service client
- Why the distinction ?
- Allows for concurrent servers that can communicate over many client connections simultaneously
- E.g., Each time we receive a new request, we fork a child to handle the request
- Allows for concurrent servers that can communicate over many client connections simultaneously
Host and Service Conversion
getaddrinfo
getaddrinfois the modern way to convert string representations of hostnames, host addresses, ports, and service names to socket address structures- Replaces obsolete
gethostbynameandgetservbynamefunctions
- Replaces obsolete
- Advantages:
- Reentrant (can be safely used by threaded programs)
- Allows us to write portable protocol-independent code
- Works with both IPv4 and IPv6
- Disadvantages:
- Somewhat complex
- Fortunately, a small number of usage patterns suffice in most cases
int getaddrinfo(const char *host, /* Hostname or address */ const char *service, /* Port or service name */ const struct addrinfo *hints, /* Input parameters */ struct addrinfo **result); /* Output linked list */
void freeaddrinfo(struct addrinfo *result); /* Free linked list */
const char *gai_strerror(int errcode); /* Return error msg. */- Given host and service,
getaddrinforeturns result that points to a linked list ofaddrinfostructs, each of which points to a corresponding socket address struct, and which contains arguments for the sockets interface functions - Helper functions:
freeadderinfofrees the entire linked listgai_strerrorconverts error code to an error message
Linked List Returned by getaddrinfo
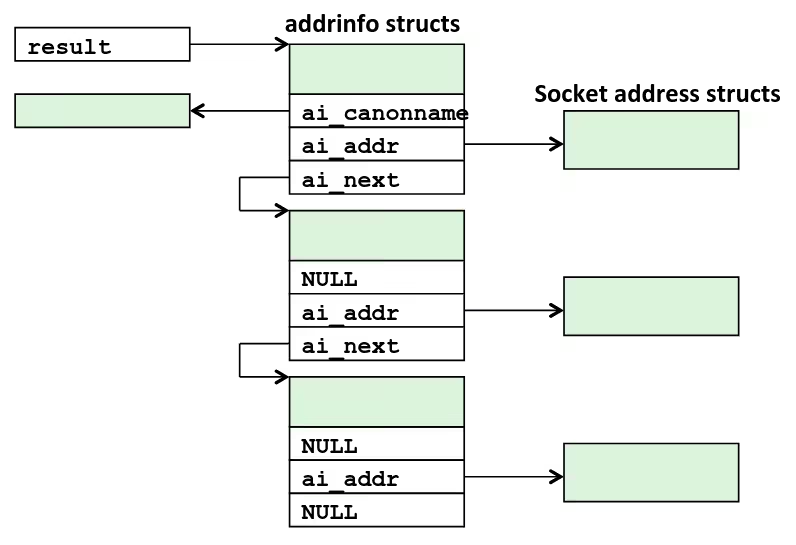
- Clients: walk this list, trying each socket address in turn, until the calls to
socketandconnectsucceed - Servers: walk the list until calls to
socketandbindsucceed
addrinfo Struct
struct addrinfo { int ai_flags; /* Hints argument flags */ int ai_family; /* First arg to socket function */ int ai_socktype; /* Second arg to socket function */ int ai_protocol; /* Third arg to socket function */ char *ai_canonname; /* Canonical host name */ size_t ai_addrlen; /* Size of ai_addr struct */ struct sockaddr *ai_addr; /* Ptr to socket address structure */ struct addrinfo *ai_next; /* Ptr to next item in linked list */};- Each addrinfo struct returned by
getaddrinfocontains arguments that can be passed directly to socket function - Also points to a socket address struct that can be passed directly to
connectandbindfunctions
getnameinfo
getnameinfois the inverse ofgetaddrinfo, converting a socket address to the corresponding host and service- Replaces obsolete
gethostbyaddrandgetservbyportfunctions - Reentrant and protocol independent
- Replaces obsolete
int getnameinfo(const SA *sa, socklen_t salen, /* In: socket addr */ char *host, size_t hostlen, /* Out: host */ char *serv, size_t servlen, /* Out: service */ int flags); /* optional flags */Conversion Example
#include <netdb.h>#include <stdio.h>#include <stdlib.h>#include <string.h>
#define MAXLINE NI_MAXHOST
typedef struct addrinfo SA;
int main(int argc, char **argv) { SA *p, *listp, hints; char buf[MAXLINE]; int rc, flags;
/* Get a list of addrinfo records */ memset(&hints, 0, sizeof(SA)); hints.ai_family = AF_INET; /* IPv4 only */ hints.ai_socktype = SOCK_STREAM; /* Connections only */
if ((rc = getaddrinfo(argv[1], NULL, &hints, &listp)) != 0) { fprintf(stderr, "getaddrinfo error: %s\n", gai_strerror(rc)); exit(1); }
/* Walk the list and display each IP address */ flags = NI_NUMERICHOST; /* Display address instead of name */ for (p = listp; p; p = p->ai_next) { getnameinfo(p->ai_addr, p->ai_addrlen, buf, MAXLINE, NULL, 0, flags); printf("%s\n", buf); }
/* Clean up */ freeaddrinfo(listp); exit(0);}Echo Client Example
open_clientfd
- Establish a connection with a server
int open_clientfd(char *hostname, char *port) { int clientfd; struct addrinfo hints, *listp, *p;
/* Get a list of potential server addresses */ memset(&hints, 0, sizeof(struct addrinfo)); hints.ai_socktype = SOCK_STREAM; /* Open a connection */ hints.ai_flags = AI_NUMERICSERV; /* Using numeric port arg. */ hints.ai_flags |= AI_ADDRCONFIG; /* Recommended for connections */
getaddrinfo(hostname, port, &hints, &listp);
/* Walk the list for one that we can successfully connect to */ for (p = listp; p; p = p->ai_next) { /* Create a socket descriptor */ if ((clientfd = socket(p->ai_family, p->ai_socktype, p->ai_protocol)) < 0) continue; /* Socket failed, try the next */
/* Connect to the server */ if (connect(clientfd, p->ai_addr, p->ai_addrlen) != -1) break; /* Success */ close(clientfd); /* Connect failed, try another */ }
/* Clean up */ freeaddrinfo(listp);
if (!p) /* All connects failed */ return -1; else /* The last connect succeeded */ return clientfd;}open_listenfd
- Create a listening descriptor that can be used to accept connection requests from clients
int open_listenfd(char *port) { struct addrinfo hints, *listp, *p; int listenfd, optval = 1;
/* Get a list of potential server addresses */ memset(&hints, 0, sizeof(struct addrinfo)); hints.ai_socktype = SOCK_STREAM; /* Accept connect. */ hints.ai_flags = AI_PASSIVE | AI_ADDRCONFIG; /* On any IP addr */ hints.ai_flags |= AI_NUMERICSERV; /* Using port no. */
getaddrinfo(NULL, port, &hints, &listp);
/* Walk the list for one that we can bind to */ for (p = listp; p; p = p->ai_next) { /* Create a socket descriptor */ if ((listenfd = socket(p->ai_family, p->ai_socktype, p->ai_protocol)) < 0) continue; /* Socket failed, try the next */
/* Eliminates "Address already in use" error from bind */ setsockopt(listenfd, SOL_SOCKET, SO_REUSEADDR, (const void *)&optval , sizeof(int));
/* Bind the descriptor to the address */ if (bind(listenfd, p->ai_addr, p->ai_addrlen) == 0) break; /* Success */ close(listenfd); /* Bind failed, try the next */ }
/* Clean up */ freeaddrinfo(listp);
if (!p) /* No address worked */ return -1;
/* Make it a listening socket ready to accept conn. requests */ if (listen(listenfd, LISTENQ) < 0) { close(listenfd); return -1; } return listenfd;}NOTEopen_clientfd and open_listenfd are both independent of any particular version of IP.
Echo Client
#include <csapp.h>
int main(int argc, char **argv) { int clientfd; char *host, *port, buf[MAXLINE]; rio_t rio;
host = argv[1]; port = argv[2];
clientfd = open_clientfd(host, port); rio_readinitb(&rio, clientfd);
while (fgets(buf, MAXLINE, stdin) != NULL) { rio_writen(clientfd, buf, strlen(buf)); rio_readlineb(&rio, buf, MAXLINE); fputs(buf, stdout); } close(clientfd); exit(0);}Iterative Echo Server
#include <csapp.h>
void echo(int connfd);
int main(int argc, char **argv) { int listenfd, connfd; socklen_t clientlen; struct sockaddr_storage clientaddr; /* Enough room for any addr */ char client_hostname[MAXLINE], client_port[MAXLINE];
listenfd = open_listenfd(argv[1]); while (1) { clientlen = sizeof(struct sockaddr_storage); /* Important! */ connfd = accept(listenfd, (SA *)&clientaddr, &clientlen); getnameinfo((SA *)&clientaddr, clientlen, client_hostname, MAXLINE, client_port, MAXLINE, 0); printf("Connected to (%s, %s)\n", client_hostname, client_port); echo(connfd); close(connfd); } exit(0);}echo
- The server uses RIO to read and echo text lines until EOF (end-of-file) condition is encountered
- EOF condition caused by client calling close(clientfd)
void echo(int connfd) { size_t n; char buf[MAXLINE]; rio_t rio;
rio_readinitb(&rio, connfd); while((n = rio_readlineb(&rio, buf, MAXLINE)) != 0) { printf("server received %d bytes\n", (int)n); rio_writen(connfd, buf, n); }}Web Server Basics
- Clients and servers communicate using the Hyper Text Transfer Protocol (HTTP)
- Client and server establish TCP connection
- Client requests content
- Server responds with requested content
- Client and server close connection (eventually)
- HTTP/1.1 RFC 2616, June, 1999
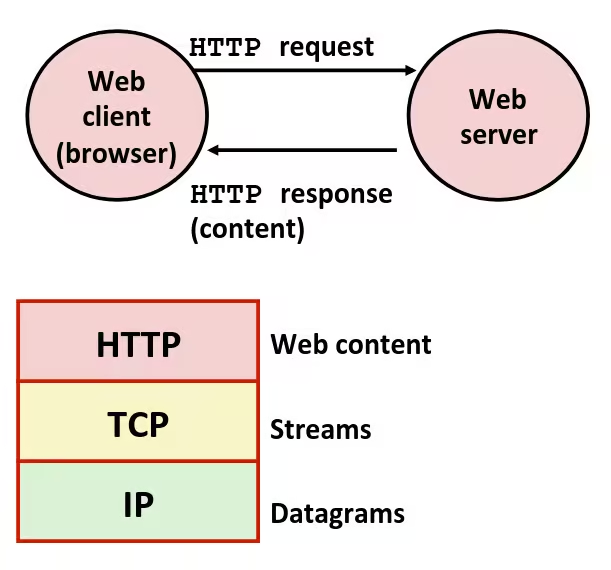
HTTP Versions
- Major differences between HTTP/1.1 and HTTP/1.0
- HTTP/1.0 uses a new connection for each transaction
- HTTP/1.1 also supports persistent connections
- Multiple transactions over the same connection
Connection: Keep-Alive
- HTTP/1.1 requires
HOSTheaderHost: www.cmu.edu- Makes it possible to host multiple websites at single Internet host
- HTTP/1.1 supports chunked encoding
Transfer-Encoding: chunked
- HTTP/1.1 adds additional support for caching
Web Content
- Web servers return content to clients
- content: a sequence of bytes with an associated MIME (Multipurpose Internet Mail Extensions) type
- Example MIME types
text/html— HTML documenttext/plain— Unformatted textimage/gif— Binary image encoded in GIF formatimage/png— Binary image encoded in PNG formatimage/jpeg— Binary image encoded in JPEG format
- The complete list of MIME types: https://www.iana.org/assignments/media-types/media-types.xhtml
Static and Dynamic Content
- The content returned in HTTP responses can be either static or dynamic
- Static content: content stored in files and retrieved in response to an HTTP request
- E.g., HTML files, images, audio clips
- Request identifies which content file
- Dynamic content: content produced on-the-fly in response to an HTTP request
- E.g., content produced by a program executed by the server on behalf of the client
- Request identifies file containing executable code
- Static content: content stored in files and retrieved in response to an HTTP request
- Bottom line: Web content is associated with a file that is managed by the server
URLs
- Unique name for a file: URL (Universal Resource Locator)
- Example URL:
http://www.cmu.edu:80/index.html
- Example URL:
- Clients use prefix (
http://www.cmu.edu:80) to infer:- What kind (protocol) of server to contact (
HTTP) - Where the server is (
www.cmu.edu) - What port it is listening on (
80)
- What kind (protocol) of server to contact (
- Servers use suffix (
/index.html) to:- Determine if request is for static or dynamic content
- No hard and fast rules for this
- One convention: executables reside in
cgi-bindirectory
- Find file on file system
- Initial
/in suffix denotes home directory for requested content - Minimal suffix is
/, which server expands to configured default filename (usually,index.html)
- Initial
- Determine if request is for static or dynamic content
HTTP Requests
- HTTP request is a request line, followed by zero or more request headers
- Request line:
<method> <uri> <version><method>is one ofGET,POST,OPTIONS,HEAD,PUT,DELETE, orTRACE<uri>is typically URL for proxies, URL suffix for servers- A URL is a type of URI (Uniform Resource Identifier)
- https://www.ietf.org/rfc/rfc2396.txt
<version>is HTTP version of request (HTTP/1.0orHTTP/1.1)
- Request headers:
<header name>: <header data>- Provide additional information to the server
HTTP Responses
- HTTP response is a response line followed by zero or more response headers, possibly followed by content, with blank line (
\r\n) separating headers from content - Response line:
<version> <status code> <status msg><version>is HTTP version of the response<status code>is numeric status<status msg>is corresponding English text200 OK— Request was handled without error301 Moved— Provide alternate URL404 Not found— Server couldn’t find the file
- Response headers:
<header name>: <header data>- Provide additional information about response
Content-Type: MIME type of content in response bodyContent-Length: Length of content in response body
Data Transfer Mechanisms
- Standard
- Specify total length with content-length
- Requires that program buffer entire message
- Chunked
- Break into blocks
- Prefix each block with number of bytes (Hex coded)
Chunked Encoding Example
HTTP/1.1 200 OK\nDate: Sun, 31 Oct 2010 20:47:48 GMT\nServer: Apache/1.3.41 (Unix)\nKeep-Alive: timeout=15, max=100\nConnection: Keep-Alive\nTransfer-Encoding: chunked\nContent-Type: text/html\n\r\nd75\r\n<html><head>.<link href="http://www.cs.cmu.edu/style/calendar.css" rel="stylesheet" type="text/css"></head><body id="calendar_body"><div id='calendar'><table width='100%' border='0' cellpadding='0' cellspacing='1' id='cal'>...</body></html>\r\n0\r\n\r\nd75\r\n— First Chunk: 0xd75 = 3445 bytes0\r\n— Second Chunk: 0 bytes (indicates last chunk)
Example HTTP Transaction
whaleshark> telnet www.cmu.edu 80 Client: open connection to serverTrying 128.2.42.52... Telnet prints 3 lines to terminalConnected to WWW-CMU-PROD-VIP.ANDREW.cmu.edu.Escape character is '^]'.GET / HTTP/1.1 Client: request lineHost: www.cmu.edu Client: required HTTP/1.1 header Client: empty line terminates headersHTTP/1.1 301 Moved Permanently Server: response lineDate: Wed, 05 Nov 2014 17:05:11 GMT Server: followed by 5 response headersServer: Apache/1.3.42 (Unix) Server: this is an Apache serverLocation: http://www.cmu.edu/index.shtml Server: page has moved hereTransfer-Encoding: chunked Server: response body will be chunkedContent-Type: text/html; charset=... Server: expect HTML in response body Server: empty line terminates headers15c Server: first line in response body<HTML><HEAD> Server: start of HTML content...</BODY></HTML> Server: end of HTML content0 Server: last line in response bodyConnection closed by foreign host. Server: closes connection- HTTP standard requires that each text line end with
\r\n - Blank line (
\r\n) terminates request and response headers
Tiny Web Server
- Tiny Web server described in text
- Tiny is a sequential Web server
- Serves static and dynamic content to real browsers
- 239 lines of commented C code
- Not as complete or robust as a real Web server
- You can break it with poorly-formed HTTP requests (e.g., terminate lines with
\ninstead of\r\n)
- You can break it with poorly-formed HTTP requests (e.g., terminate lines with
Operation
- Accept connection from client
- Read request from client (via connected socket)
- Split into
<method> <uri> <version>- If method not GET, then return error
- If URI contains
cgi-binthen serve dynamic content- Would do wrong thing if had file
abcgi-bingo.html - Fork process to execute program
- Would do wrong thing if had file
- Otherwise serve static content
- Copy file to output
Serving Static Content
void serve_static(int fd, char *filename, int filesize) { int srcfd; char *srcp, filetype[MAXLINE], buf[MAXBUF];
/* Send response headers to client */ get_filetype(filename, filetype); sprintf(buf, "HTTP/1.0 200 OK\r\n"); sprintf(buf, "%sServer: Tiny Web Server\r\n", buf); sprintf(buf, "%sConnection: close\r\n", buf); sprintf(buf, "%sContent-length: %d\r\n", buf, filesize); sprintf(buf, "%sContent-type: %s\r\n\r\n", buf, filetype); rio_writen(fd, buf, strlen(buf));
/* Send response body to client */ srcfd = open(filename, O_RDONLY, 0); srcp = mmap(0, filesize, PROT_READ, MAP_PRIVATE, srcfd, 0); close(srcfd); rio_writen(fd, srcp, filesize); munmap(srcp, filesize);}Serving Dynamic Content
- Client sends request to server
- If request URI contains the string
/cgi-bin, the Tiny server assumes that the request is for dynamic content
- The server creates a child process and runs the program identified by the URI in that process
- The child runs and generates the dynamic content
- The server captures the content of the child and forwards it without modification to the client
Issues in Serving Dynamic Content
- How does the client pass program arguments to the server ?
- How does the server pass these arguments to the child ?
- How does the server pass other info relevant to the request to the child ?
- How does the server capture the content produced by the child ?
- These issues are addressed by the Common Gateway Interface (CGI) specification
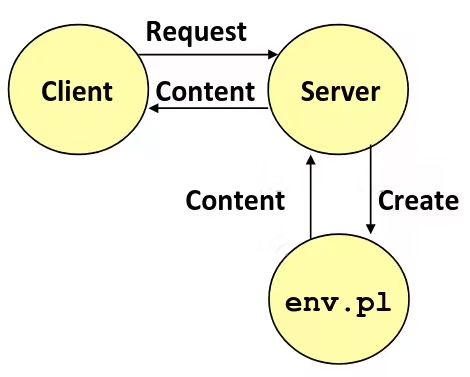
CGI
- Because the children are written according to the CGI spec, they are often called CGI programs
- However, CGI really defines a simple standard for transferring information between the client (browser), the server, and the child process
- CGI is the original standard for generating dynamic content. Has been largely replaced by other, faster techniques:
- E.g., fastCGI, Apache modules, Java servlets, Rails controllers
- Avoid having to create process on the fly (expensive and slow)
Serving Dynamic Content With GET
- Client pass arguments to the server by appended the arguments to the URI
- Can be encoded directly in a URL typed to a browser or a URL in an HTML link
http://add.com/cgi-bin/adder?15213&18213adderis the CGI program on the server that will do the addition- Argument list starts with
? - Arguments separated by
& - Spaces represented by
+or%20
- URL suffix:
cgi-bin/adder?15213&18213 - Result displayed on browser:
Welcome to add.com: THE Internet addition portal.
The answer is: 15213 + 18213 = 33426
Thanks for visiting!- The server pass these arguments to the child by environment variable in
QUERY_STRING- A single string containing everything after the
? - For add:
QUERY_STRING = 15213&18213
- A single string containing everything after the
/* Extract the two arguments */if ((buf = getenv("QUERY_STRING")) != NULL) { p = strchr(buf, '&'); *p = '\0'; strcpy(arg1, buf); strcpy(arg2, p+1); n1 = atoi(arg1); n2 = atoi(arg2);}- The child generates its output on stdout. Server uses dup2 to redirect stdout to its connected socket. So the server capture the content produced by the child
void serve_dynamic(int fd, char *filename, char *cgiargs) { char buf[MAXLINE], *emptylist[] = { NULL };
/* Return first part of HTTP response */ sprintf(buf, "HTTP/1.0 200 OK\r\n"); rio_writen(fd, buf, strlen(buf)); sprintf(buf, "Server: Tiny Web Server\r\n"); rio_writen(fd, buf, strlen(buf));
if (fork() == 0) { /* Child */ /* Real server would set all CGI vars here */ setenv("QUERY_STRING", cgiargs, 1); dup2(fd, STDOUT_FILENO); /* Redirect stdout to client */ execve(filename, emptylist, environ); /* Run CGI program */ } wait(NULL); /* Parent waits for and reaps child */}- Notice that only the CGI child process knows the content type and length, so it must generate those headers
/* Make the response body */sprintf(content, "Welcome to add.com: ");sprintf(content, "%sTHE Internet addition portal.\r\n<p>", content);sprintf(content, "%sThe answer is: %d + %d = %d\r\n<p>", content, n1, n2, n1 + n2);sprintf(content, "%sThanks for visiting!\r\n", content);
/* Generate the HTTP response */printf("Content-length: %d\r\n", (int)strlen(content));printf("Content-type: text/html\r\n\r\n");printf("%s", content);fflush(stdout);exit(0);Proxies
- A proxy is an intermediary between a client and an origin server
- To the client, the proxy acts like a server
- To the server, the proxy acts like a client
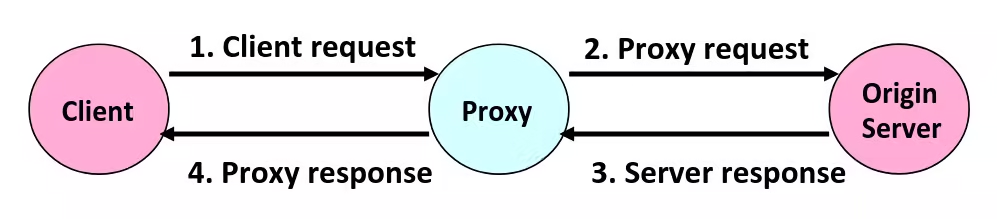
Why Proxies ?
- Can perform useful functions as requests and responses pass by
- Examples: Caching, logging, anonymization, filtering, transcoding
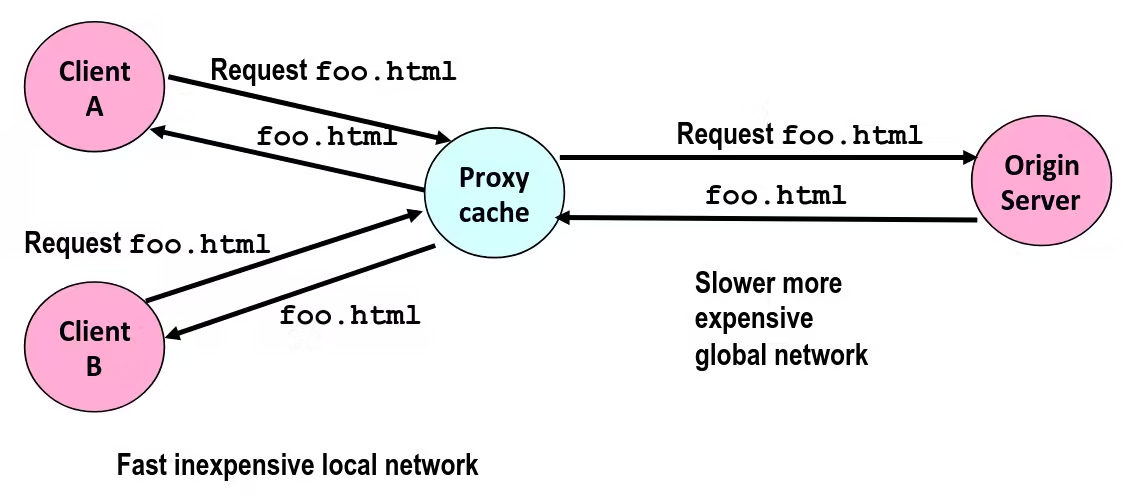
Concurrent Programming
Concurrent Programming is Hard
-
The human mind tends to be sequential
-
The notion of time is often misleading
-
Thinking about all possible sequences of events in a computer system is at least error prone and frequently impossible
-
Classical problem classes of concurrent programs:
- Races: outcome depends on arbitrary scheduling decisions elsewhere in the system
- Example: who gets the last seat on the airplane ?
- Deadlock: improper resource allocation prevents forward progress
- Example: traffic gridlock
- Livelock / Starvation / Fairness: external events and/or system scheduling decisions can prevent sub-task progress
- Example: people always jump in front of you in line
- Races: outcome depends on arbitrary scheduling decisions elsewhere in the system
Iterative Servers
- Iterative servers process one request at a time
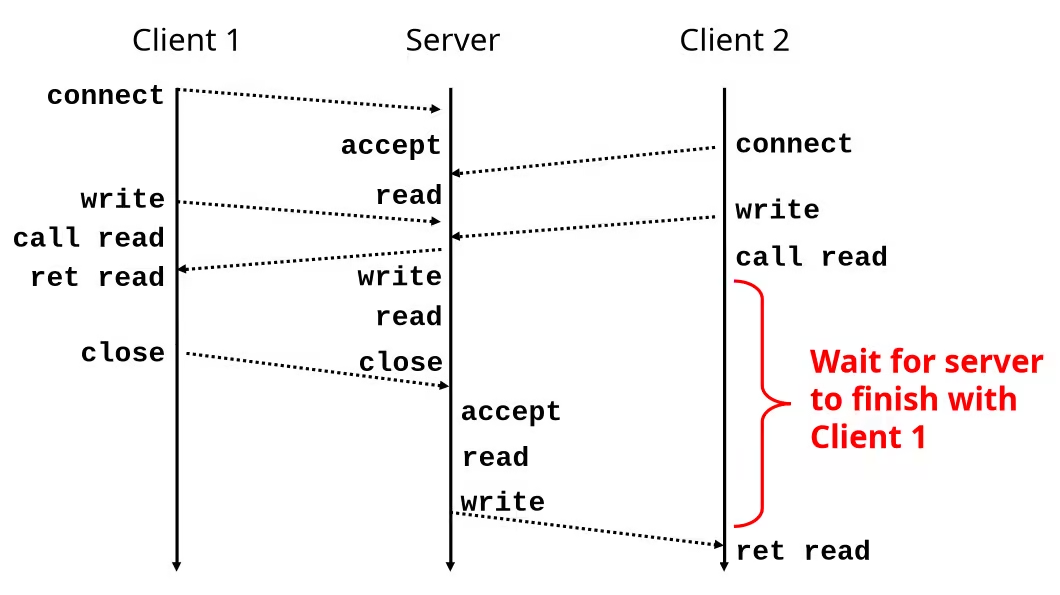
- Second client attempts to connect to iterative server
- Call to connect returns
- Even though connection not yet accepted
- Server side TCP manager queues request
- Feature known as “TCP listen backlog”
- Call to rio_writen returns
- Server side TCP manager buffers input data
- Call to rio_readlineb blocks
- Server hasn’t written anything for it to read yet
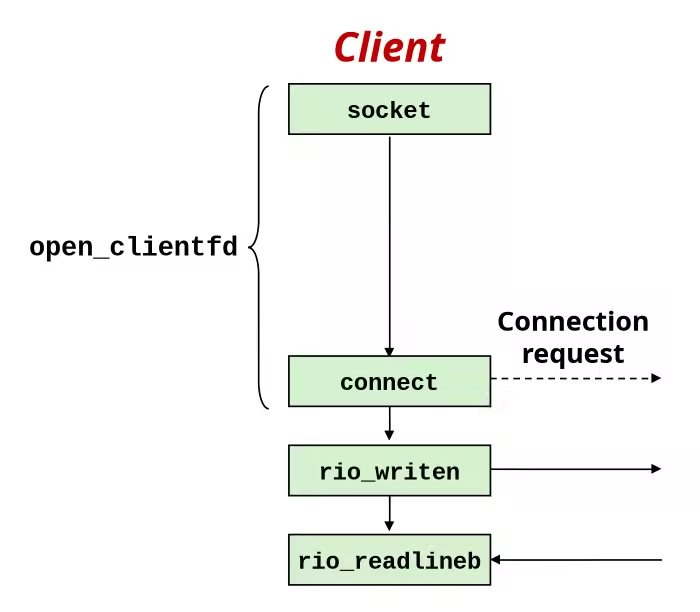
- Solution: use concurrent servers instead
- Concurrent servers use multiple concurrent flows to serve multiple clients at the same time
Approaches for Writing Concurrent Servers
- Process-based
- Kernel automatically interleaves multiple logical flows
- Each flow has its own private address space
- Event-based
- Programmer manually interleaves multiple logical flows
- All flows share the same address space
- Uses technique called I/O multiplexing
- Thread-based
- Kernel automatically interleaves multiple logical flows
- Each flow shares the same address space
- Hybrid of of process-based and event-based
Process-based Servers
- Spawn separate process for each client
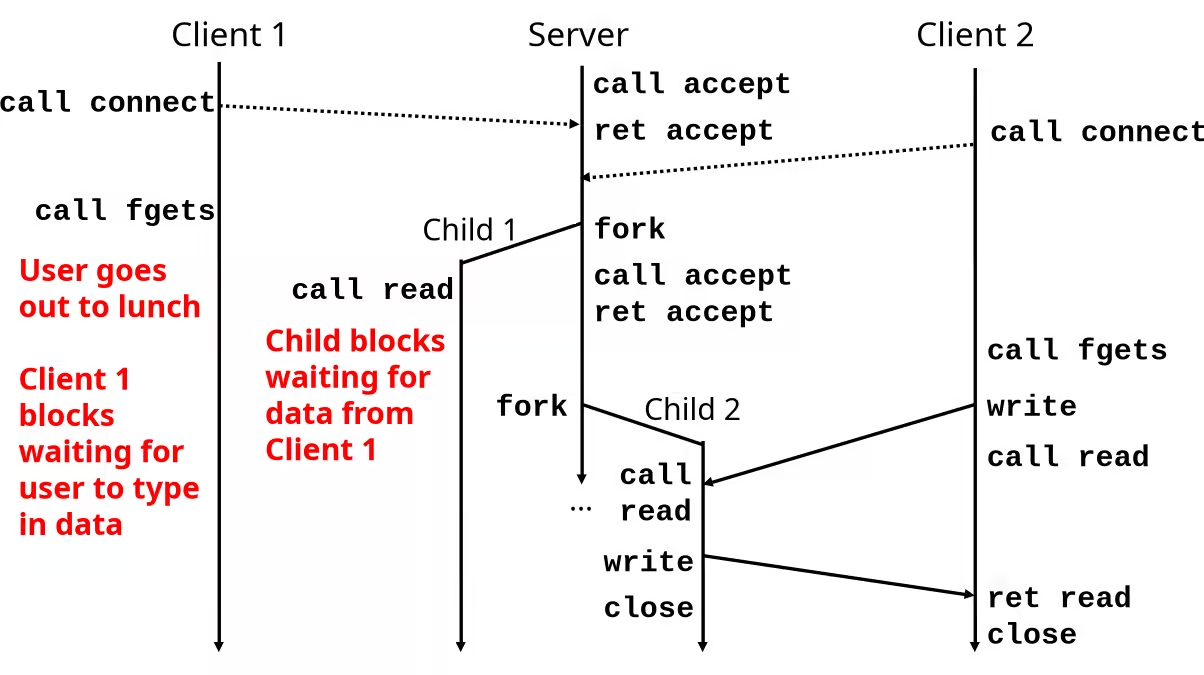
Process-Based Concurrent Echo Server
void sigchld_handler(int sig) { /* Reap all zombie children */ while (waitpid(-1, 0, WNOHANG) > 0) ; return;}
int main(int argc, char **argv) { int listenfd, connfd; socklen_t clientlen; struct sockaddr_storage clientaddr;
signal(SIGCHLD, sigchld_handler); listenfd = open_listenfd(argv[1]); while (1) { clientlen = sizeof(struct sockaddr_storage); connfd = accept(listenfd, (SA *)&clientaddr, &clientlen);
if (fork() == 0) { close(listenfd); /* Child closes its listening socket */ echo(connfd); /* Child services client */ close(connfd); /* Child closes connection with client */ exit(0); /* Child exits */ } close(connfd); /* Parent closes connected socket (important!) */ }}Process-based Server Execution Model
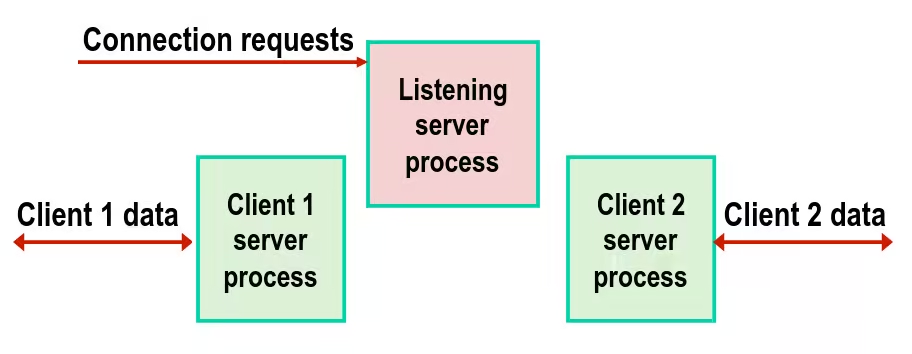
- Each client handled by independent child process
- No shared state between them
- Both parent & child have copies of listenfd and connfd
- Parent must close connfd
- Child should close listenfd
Issues with Process-based Servers
- Listening server process must reap zombie children to avoid fatal memory leak
- Parent process must close its copy of connfd
- Kernel keeps reference count for each socket/open file
- After fork,
refcnt(connfd) = 2 - Connection will not be closed until
refcnt(connfd) = 0
Pros and Cons of Process-based Servers
- Handle multiple connections concurrently
- Clean sharing model
- descriptors (no)
- file tables (yes)
- global variables (no)
- Simple and straightforward
- Additional overhead for process control
- Nontrivial to share data between processes
- Requires IPC (interprocess communication) mechanisms
- FIFO’s (named pipes), System V shared memory and semaphores
- Requires IPC (interprocess communication) mechanisms
Event-based Servers
- Server maintains set of active connections
- Array of connfd’s
- Repeat:
- Determine which descriptors (connfd’s or listenfd) have pending inputs
- e.g., using
selectorepollfunctions - arrival of pending input is an event
- e.g., using
- If listenfd has input, then accept connection and add new connfd to array
- Service all connfd’s with pending inputs
- Determine which descriptors (connfd’s or listenfd) have pending inputs
I/O Multiplexed Event Processing
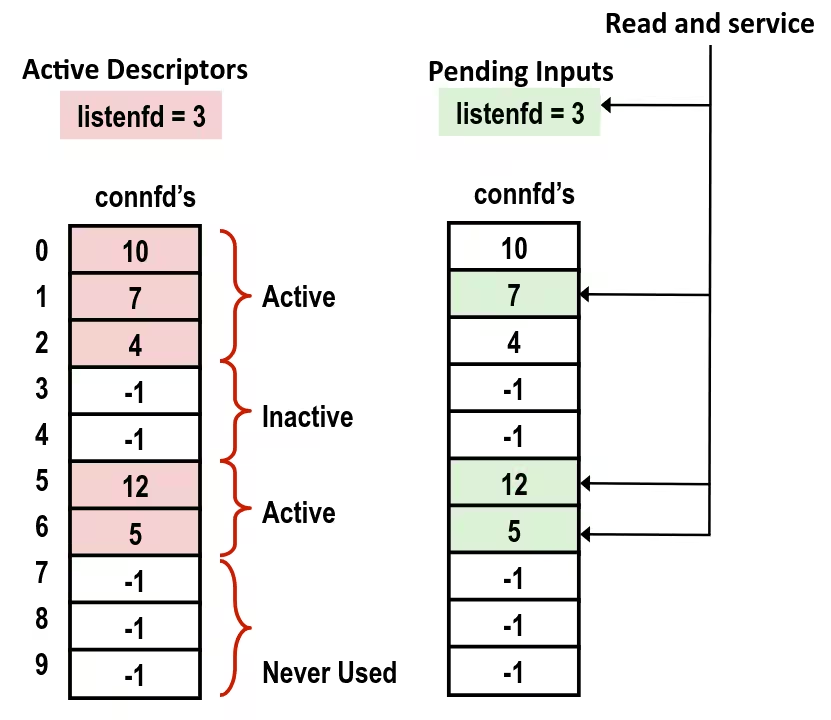
Pros and Cons of Event-based Servers
- One logical control flow and address space
- Can single-step with a debugger
- No process or thread control overhead
- Design of choice for high-performance Web servers and search engines
- E.g., Node.js, Nginx, Tornado
- Design of choice for high-performance Web servers and search engines
- Significantly more complex to code than process-based or thread-based designs
- Hard to provide fine-grained concurrency
- E.g., How to deal with partial HTTP request headers
- Cannot take advantage of multi-core
- Single thread of control
Thread-based Servers
- Very similar to process-based approach
- …but using threads instead of processes
Traditional View of a Process
- Process = Process Context + Code, Data, and Stack
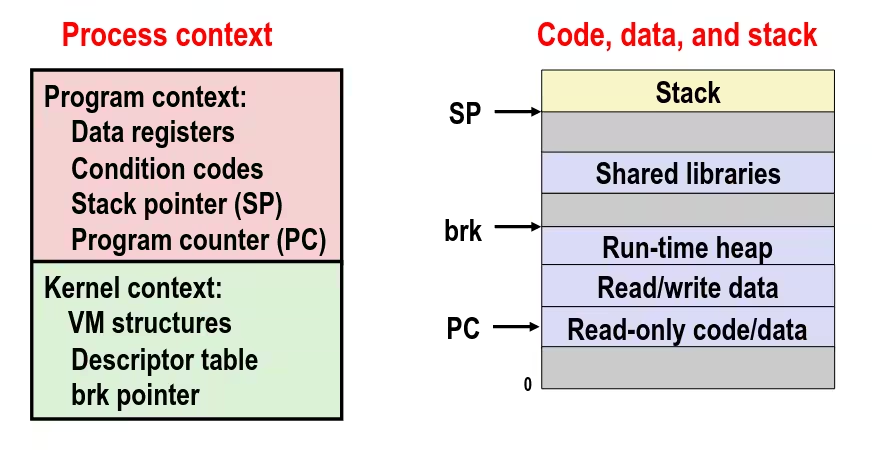
Alternate View of a Process
Process = Thread + Code, Data, and Kernel Context
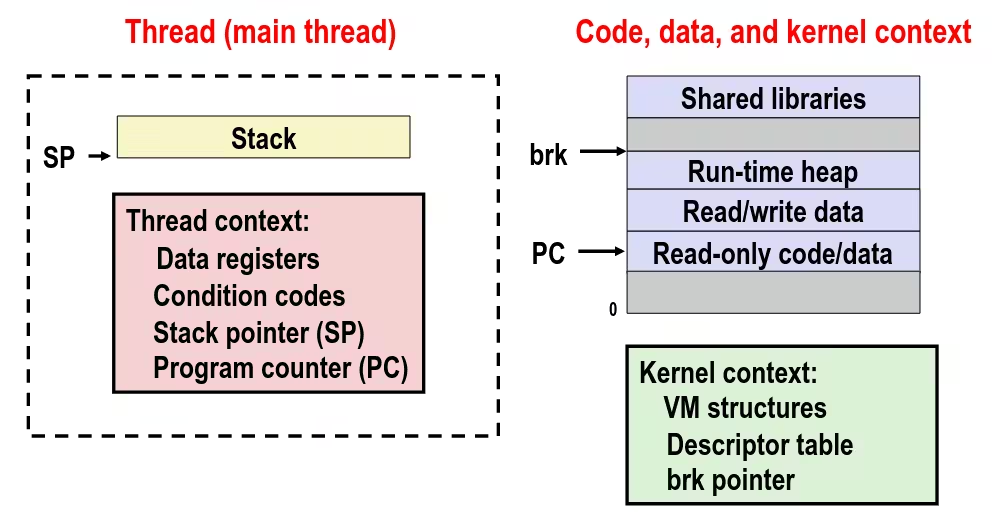
A Process With Multiple Threads
- Multiple threads can be associated with a process
- Each thread has its own logical control flow
- Each thread shares the same code, data, and kernel context
- Each thread has its own stack for local variables
- but not protected from other threads
- Each thread has its own Thread ID (TID)
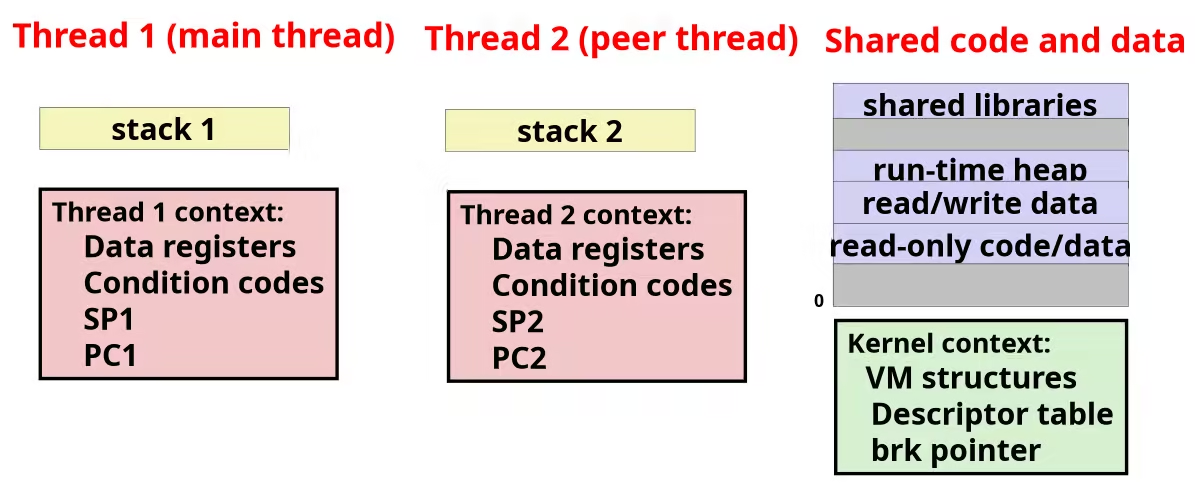
Logical View of Threads
- Threads associated with process form a pool of peers
- Unlike processes which form a tree hierarchy

Concurrent Threads
- Two threads are concurrent if their flows overlap in time
- Otherwise, they are sequential
- Examples:
- Concurrent: A & B, A & C
- Sequential: B & C
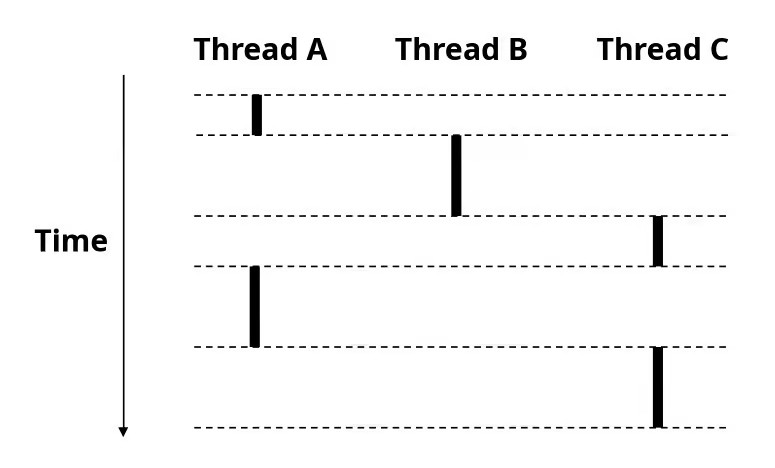
Concurrent Thread Execution
- Single Core Processor
- Simulate parallelism by time slicing
- Multi Core Processor
- Can have true parallelism
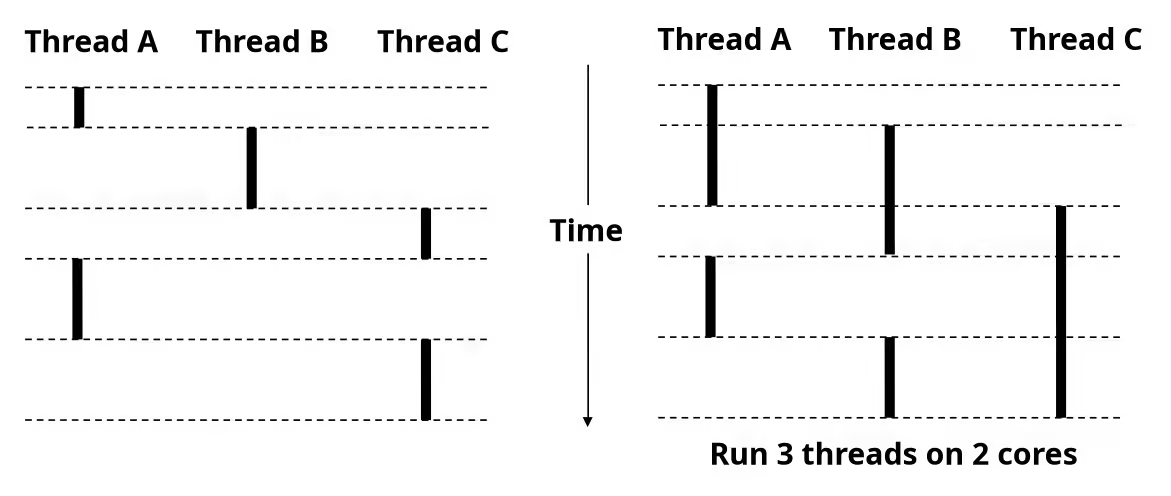
Threads vs. Processes
- How threads and processes are similar ?
- Each has its own logical control flow
- Each can run concurrently with others (possibly on different cores)
- Each is context switched
- How threads and processes are different ?
- Threads share all code and data (except local stacks)
- Processes (typically) do not
- Threads are somewhat less expensive than processes
- Process control (creating and reaping) twice as expensive as thread control
- Linux numbers:
- ~20K cycles to create and reap a process
- ~10K cycles (or less) to create and reap a thread
- Threads share all code and data (except local stacks)
Posix Threads (Pthreads) Interface
- Pthreads: Standard interface for ~60 functions that manipulate threads from C programs
- Creating and reaping threads
pthread_create()pthread_join()
- Determining your thread ID
pthread_self()
- Terminating threads
pthread_cancel()pthread_exit()exit()terminates all threads ,retterminates current thread
- Synchronizing access to shared variables
pthread_mutex_initpthread_mutex_[un]lock
- Creating and reaping threads
The Pthreads “hello, world” Program
void *thread(void *vargp);
int main() { pthread_t tid;
pthread_create(&tid, NULL, thread, NULL); pthread_join(tid, NULL); exit(0);}
void *thread(void *vargp) { printf("Hello, world!\n"); return NULL;}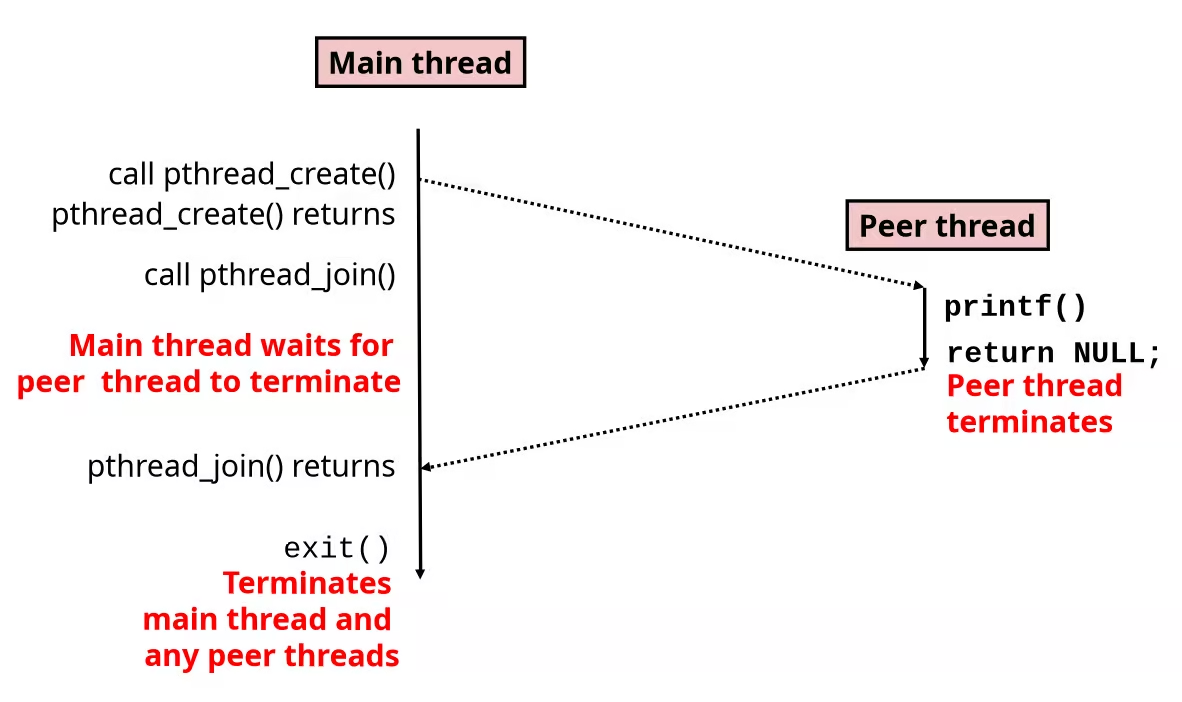
Thread-Based Concurrent Echo Server
void *thread(void *vargp);
int main(int argc, char **argv) { int listenfd, *connfdp; socklen_t clientlen; struct sockaddr_storage clientaddr; pthread_t tid;
listenfd = open_listenfd(argv[1]); while (1) { clientlen = sizeof(struct sockaddr_storage); connfdp = malloc(sizeof(int)); *connfdp = accept(listenfd, (SA *)&clientaddr, &clientlen); pthread_create(&tid, NULL, thread, connfdp); }}
void *thread(void *vargp) { int connfd = *((int *)vargp);
pthread_detach(pthread_self()); free(vargp); echo(connfd); close(connfd); return NULL;}mallocof connected descriptor necessary to avoid deadly race (but still have subtle problem)- Run thread in
detachedmode- Runs independently of other threads
- Reaped automatically (by kernel) when it terminates
- Free storage allocated to hold connfd
- Close connfd (important!)
Thread-based Server Execution Model
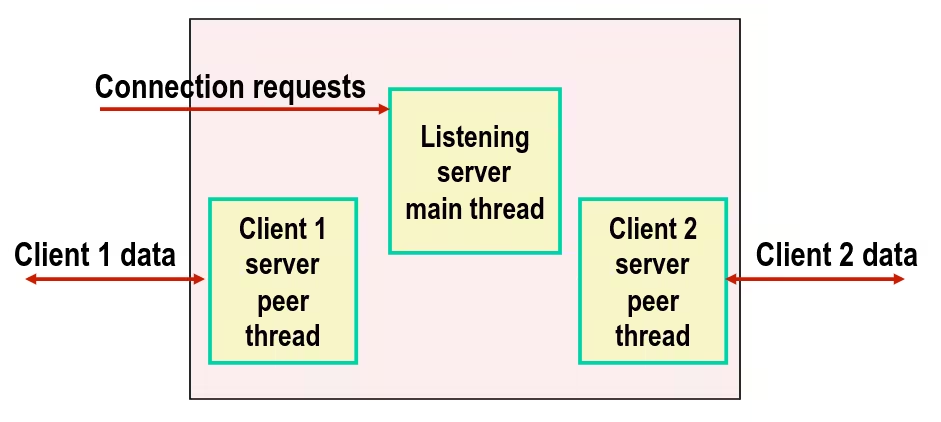
- Each client handled by individual peer thread
- Threads share all process state except TID
- Each thread has a separate stack for local variables
Issues With Thread-Based Servers
- Must run “detached” to avoid memory leak
- At any point in time, a thread is either joinable or detached
- Joinable thread can be reaped and killed by other threads
- must be reaped (with pthread_join) to free memory resources
- Detached thread cannot be reaped or killed by other threads
- resources are automatically reaped on termination
- Default state is joinable
- use
pthread_detach(pthread_self())to make detached
- use
- Must be careful to avoid unintended sharing
- For example, passing pointer to main thread’s stack
pthread_create(&tid, NULL, thread, (void *)&connfd);
- All functions called by a thread must be thread-safe
- For example, passing pointer to main thread’s stack
Pros and Cons of Thread-Based Designs
- Easy to share data structures between threads
- e.g., logging information, file cache
- Threads are more efficient than processes
- Unintentional sharing can introduce subtle and hard-to-reproduce errors !
- The ease with which data can be shared is both the greatest strength and the greatest weakness of threads
- Hard to know which data shared & which private
- Hard to detect by testing
- Probability of bad race outcome very low
- But nonzero !
Synchronization
Shared Variables in Threaded C Programs
- Question: Which variables in a threaded C program are shared ?
- The answer is not as simple as “global variables are shared” and “stack variables are private”
- Def: A variable x is shared if and only if multiple threads reference some instance of x
- Requires answers to the following questions:
- What is the memory model for threads ?
- How are instances of variables mapped to memory ?
- How many threads might reference each of these instances ?
Threads Memory Model
- Conceptual model:
- Multiple threads run within the context of a single process
- Each thread has its own separate thread context
- Thread ID, stack, stack pointer, PC, condition codes, and GP registers
- All threads share the remaining process context
- Code, data, heap, and shared library segments of the process virtual address space
- Open files and installed handlers
- Operationally, this model is not strictly enforced:
- Register values are truly separate and protected, but…
- Any thread can read and write the stack of any other thread
CAUTIONThe mismatch between the conceptual and operation model is a source of confusion and errors.
Example Program to Illustrate Sharing
void *thread(void *vargp);
char **ptr; /* global var */
int main() { long i; pthread_t tid; char *msgs[2] = { "Hello from foo", "Hello from bar" };
ptr = msgs; for (i = 0; i < 2; i++) pthread_create(&tid, NULL, thread, (void *)i); pthread_exit(NULL);}
void *thread(void *vargp) { long myid = (long)vargp; static int cnt = 0;
printf("[%ld]: %s (cnt=%d)\n", myid, ptr[myid], ++cnt); return NULL;}- Peer threads reference main thread’s stack indirectly through global ptr variable
ptr,cnt, andmsgsare shared,iandmyidare not shared
Example for Improper Synchronizing Threads
void *thread(void *vargp);
/* Global shared variable */volatile long cnt = 0;
int main(int argc, char **argv) { long niters; pthread_t tid1, tid2;
niters = atoi(argv[1]); pthread_create(&tid1, NULL, thread, &niters); pthread_create(&tid2, NULL, thread, &niters); pthread_join(tid1, NULL); pthread_join(tid2, NULL);
/* Check result */ if (cnt != (2 * niters)) printf("BOOM! cnt=%ld\n", cnt); else printf("OK cnt=%ld\n", cnt); exit(0);}
void *thread(void *vargp) { long i, niters = *((long *)vargp); for (i = 0; i < niters; i++) cnt++; return NULL;}linux> ./badcnt 10000OK cnt=20000linux> ./badcnt 10000BOOM! cnt=13051linux>cnt should equal 20,000. What went wrong ?
Assembly Code for Counter Loop
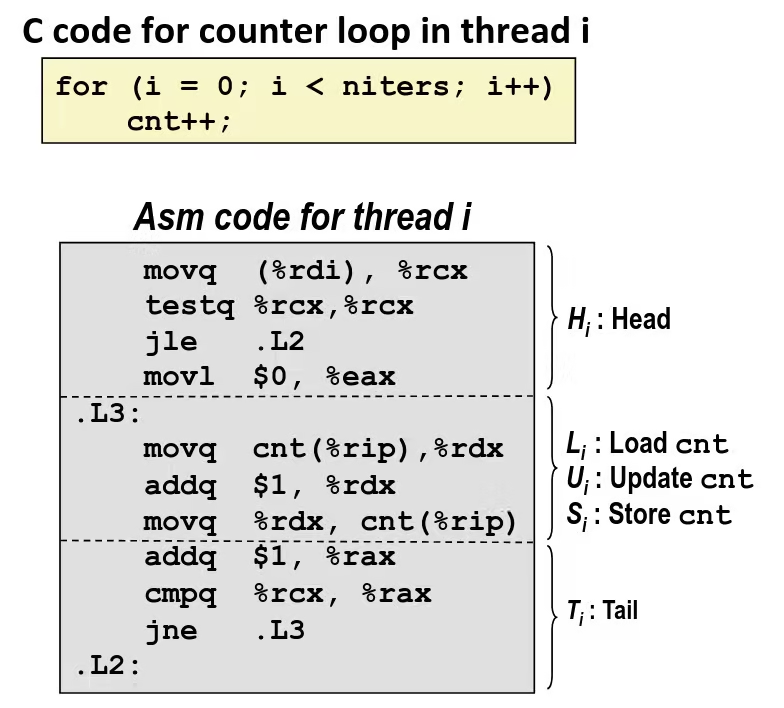
Concurrent Execution
- Key idea: In general, any sequentially consistent interleaving is possible, but some give an unexpected result !
- denotes that thread executes instruction
- is the content of in thread ‘s context
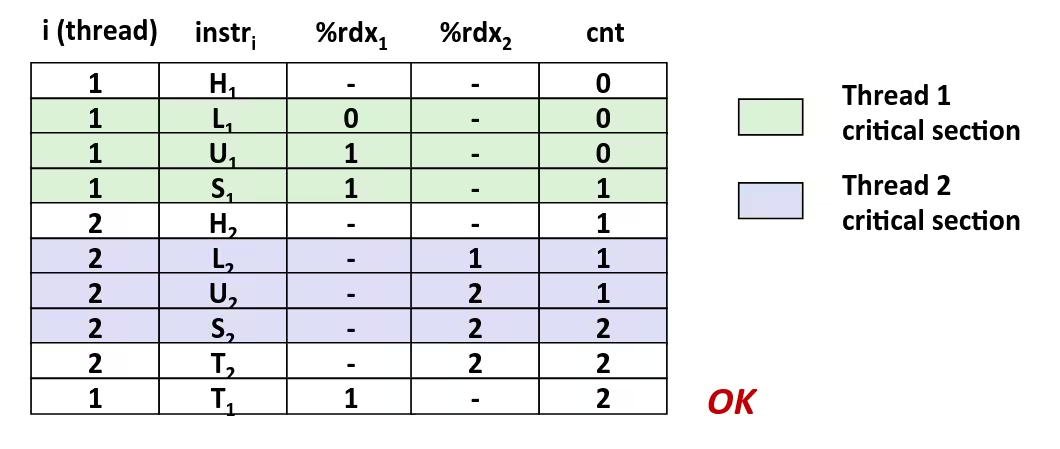
- Incorrect ordering: two threads increment the counter, but the result is 1 instead of 2
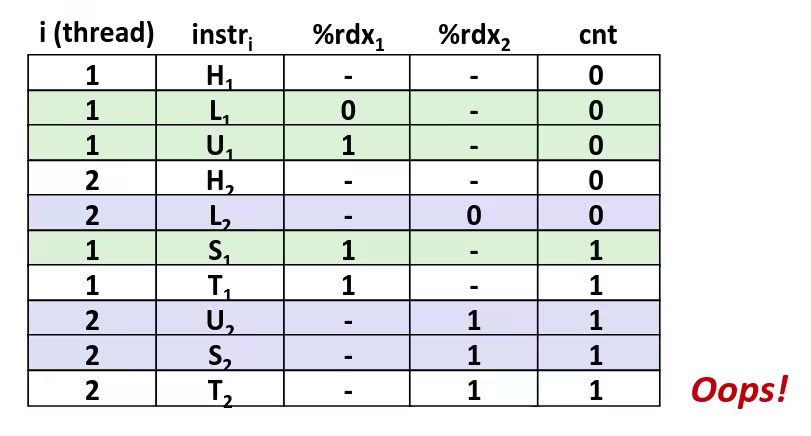
- And the following ordering is still wrong
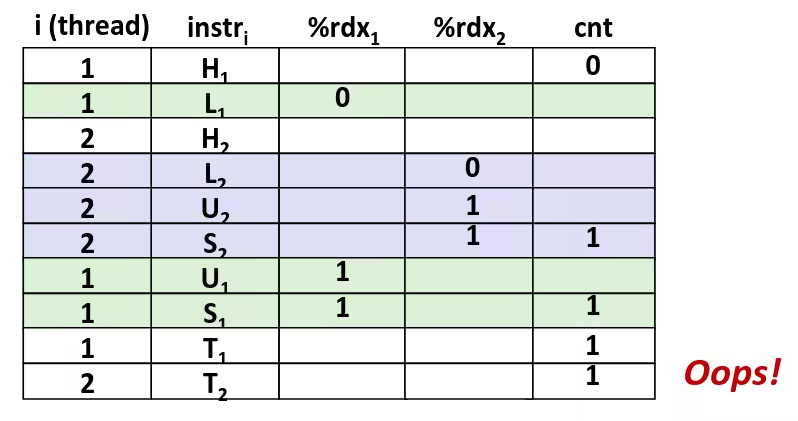
- We can analyze the behavior using a progress graph
Progress Graphs
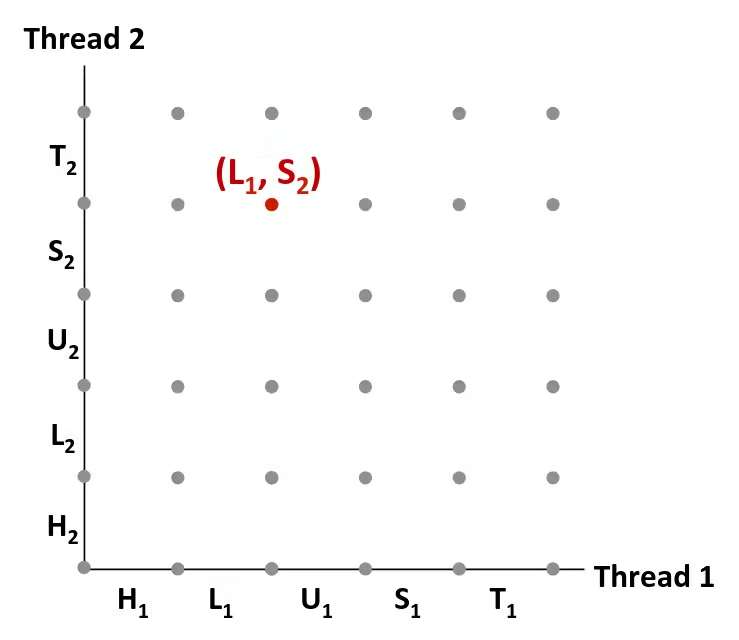
- A progress graph depicts the discrete execution state space of concurrent threads
- Each axis corresponds to the sequential order of instructions in a thread
- Each point corresponds to a possible execution state
- E.g., denotes state where thread 1 has completed and thread 2 has completed
Trajectories in Progress Graphs
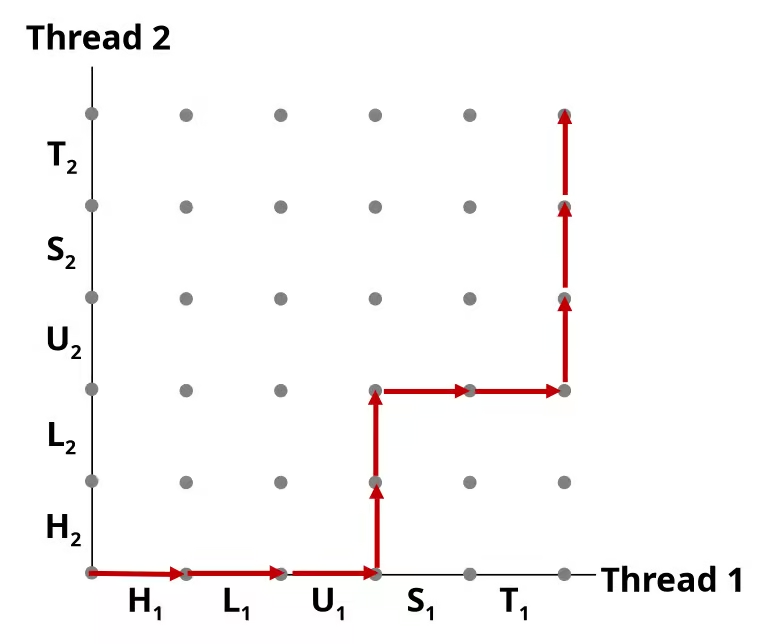
- A trajectory is a sequence of legal state transitions that describes one possible concurrent execution of the threads
Critical Sections and Unsafe Regions
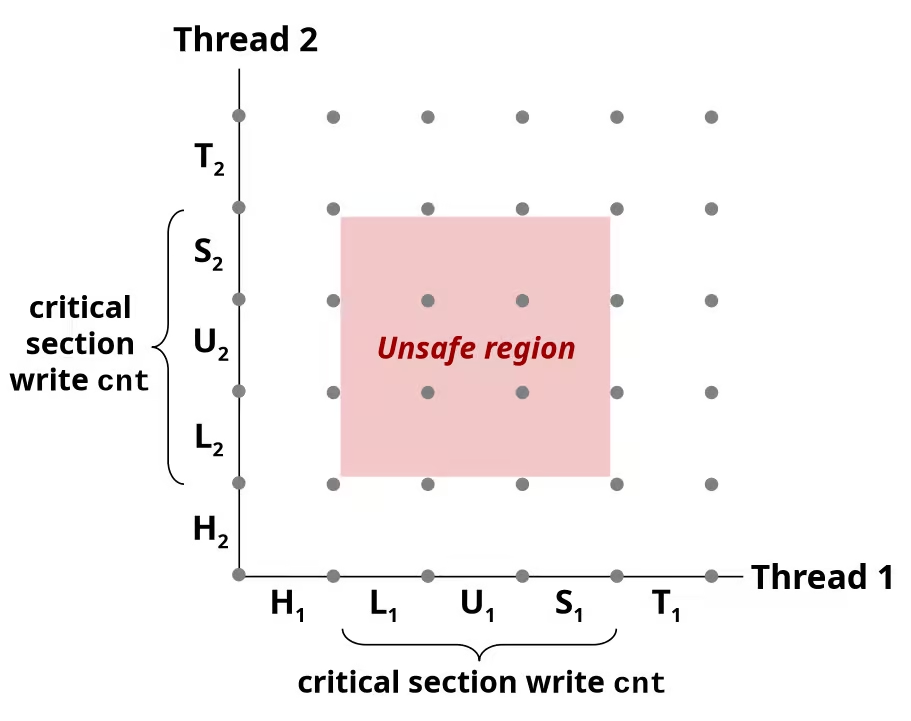
- , , and form a critical section with respect to the shared variable cnt
- Instructions in critical sections (write some shared variable) should not be interleaved
- Sets of states where such interleaving occurs form unsafe regions
- Def: A trajectory is safe iff it does not enter any unsafe region
- Claim: A trajectory is correct (write cnt) iff it is safe
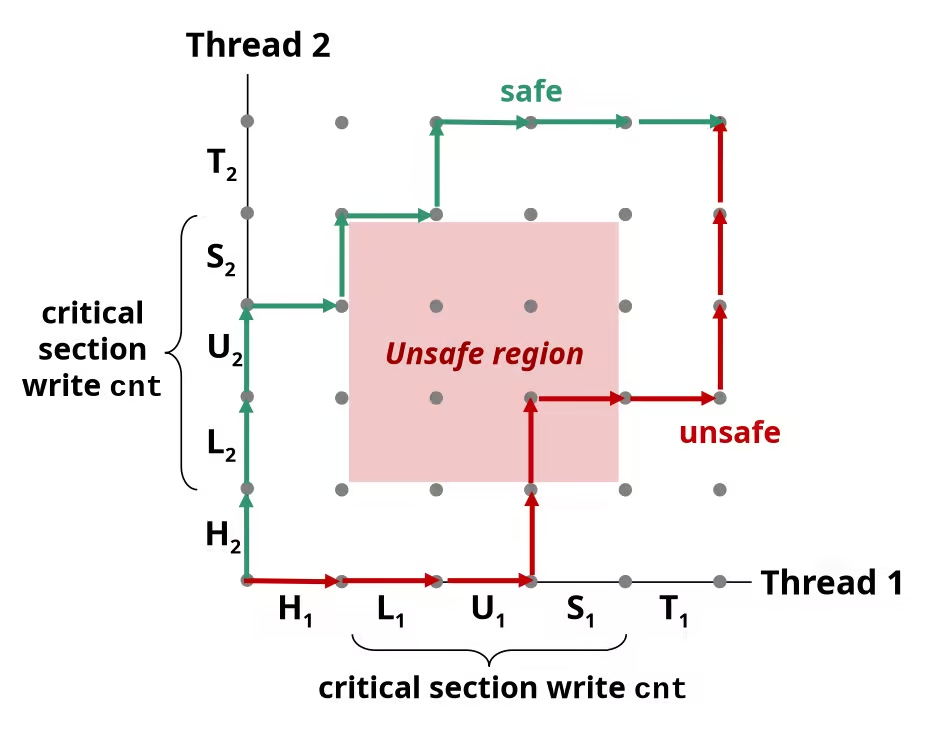
Enforcing Mutual Exclusion
- Question: How can we guarantee a safe trajectory ?
- Answer: We must synchronize the execution of the threads so that they can never have an unsafe trajectory
- i.e., need to guarantee mutually exclusive access for each critical section
- Classic solution:
- Semaphores (Edsger Dijkstra)
- Other approaches:
- Mutex and condition variables (Pthreads)
- Monitors (Java)
Semaphores
- Semaphore: non-negative global integer synchronization variable. Manipulated by
PandVoperations (P and V correspond to the dutch words Proberen and Verhogen respectively) P(s)- If s is nonzero, then decrement s by 1 and return immediately
- Test and decrement operations occur atomically (indivisibly)
- If s is zero, then suspend thread until s becomes nonzero and the thread is restarted by a V operation
- After restarting, the P operation decrements s and returns control to the caller
- If s is nonzero, then decrement s by 1 and return immediately
V(s)- Increment s by 1
- Increment operation occurs atomically
- If there are any threads blocked in a P operation waiting for s to become non-zero, then restart exactly one of those threads, which then completes its P operation by decrementing s
- Increment s by 1
- Semaphore invariant:
Using Semaphores for Mutual Exclusion
#include <semaphore.h>
int sem_init(sem_t *s, 0, unsigned int val); /* s = val */int sem_wait(sem_t *s); /* P(s) */int sem_post(sem_t *s); /* V(s) */- Basic idea:
- Associate a unique semaphore mutex, initially 1, with each shared variable (or related set of shared variables)
- Surround corresponding critical sections with
P(mutex)andV(mutex)operations
- Terminology:
- Binary semaphore: semaphore whose value is always 0 or 1
- Mutex: binary semaphore used for mutual exclusion
- P operation: “locking” the mutex
- V operation: “unlocking” or “releasing” the mutex
- “Holding” a mutex: locked and not yet unlocked
- Counting semaphore: used as a counter for set of available resources
Fix for Improper Synchronizing Threads
- Define and initialize a mutex for the shared variable cnt:
volatile long cnt = 0; /* Counter */sem_t mutex; /* Semaphore that protects cnt */sem_init(&mutex, 0, 1); /* mutex = 1 */- Surround critical section with P and V:
for (i = 0; i < niters; i++) { sem_wait(&mutex); cnt++; sem_post(&mutex);}WARNINGIts orders of magnitude slower than improper one.
Why Mutexes Work
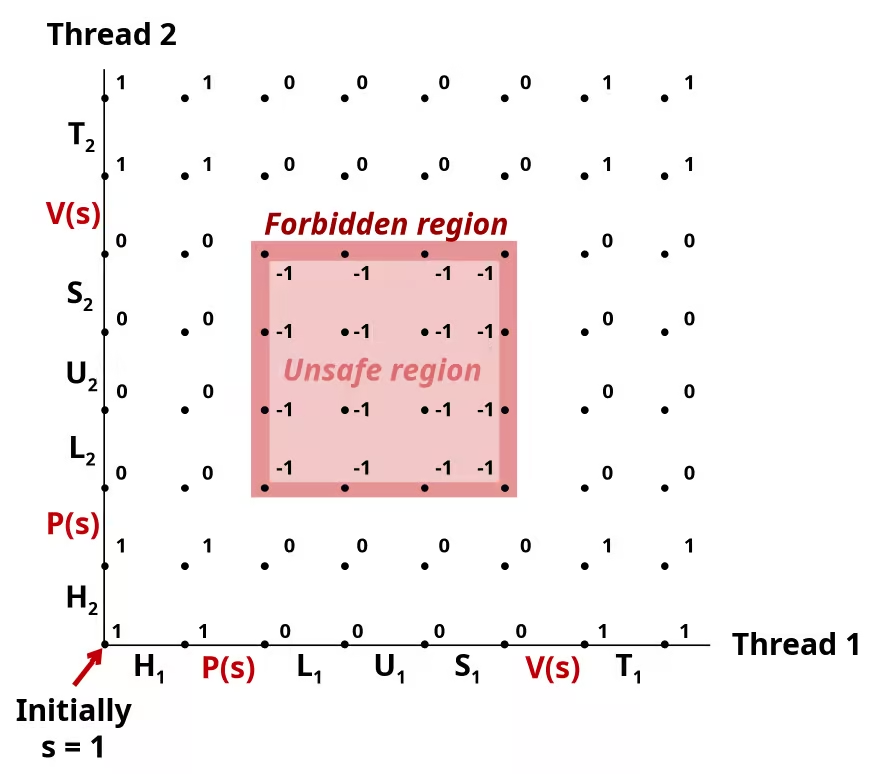
- Provide mutually exclusive access to shared variable by surrounding critical section with P and V operations on semaphore s (initially set to 1)
- Semaphore invariant creates a forbidden region that encloses unsafe region and that cannot be entered by any trajectory
Using Semaphores to Coordinate Access to Shared Resources
- Basic idea: Thread uses a semaphore operation to notify another thread that some condition has become true
- Use counting semaphores to keep track of resource state and to notify other threads
- Use mutex to protect access to resource
- Two classic examples:
- The Producer-Consumer Problem
- The Readers-Writers Problem
Producer-Consumer Problem
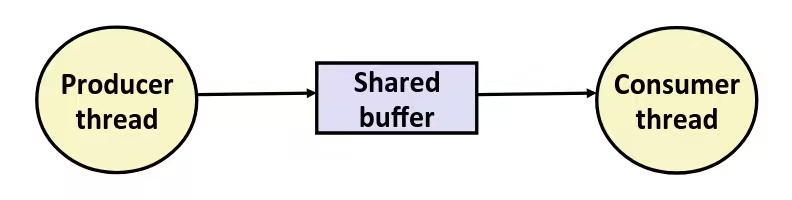
- Common synchronization pattern:
- Producer waits for empty slot, inserts item in buffer, and notifies consumer
- Consumer waits for item, removes it from buffer, and notifies producer
- Examples:
- Multimedia processing:
- Producer creates MPEG video frames, consumer renders them
- Event-driven graphical user interfaces
- Producer detects mouse clicks, mouse movements, and keyboard hits and inserts corresponding events in buffer
- Consumer retrieves events from buffer and paints the display
- Multimedia processing:
Producer-Consumer on an n-element Buffer
- Requires a mutex and two counting semaphores:
mutex: enforces mutually exclusive access to the bufferslots: counts the available slots in the bufferitems: counts the available items in the buffer
- Implemented using a shared circular (ring) buffer package called sbuf
sbuf Package
typedef struct { int *buf; /* Buffer array */ int n; /* Maximum number of slots */ int front; /* buf[(front+1)%n] is first item */ int rear; /* buf[rear%n] is last item */ sem_t mutex; /* Protects accesses to buf */ sem_t slots; /* Counts available slots */ sem_t items; /* Counts available items */} sbuf_t;
void sbuf_init(sbuf_t *sp, int n);void sbuf_deinit(sbuf_t *sp);void sbuf_insert(sbuf_t *sp, int item);int sbuf_remove(sbuf_t *sp);/* Create an empty, bounded, shared FIFO buffer with n slots */void sbuf_init(sbuf_t *sp, int n) { sp->buf = calloc(n, sizeof(int)); sp->n = n; /* Buffer holds max of n items */ sp->front = sp->rear = 0; /* Empty buffer iff front == rear */ sem_init(&sp->mutex, 0, 1); /* Binary semaphore for locking */ sem_init(&sp->slots, 0, n); /* Initially, buf has n empty slots */ sem_init(&sp->items, 0, 0); /* Initially, buf has 0 items */}
/* Clean up buffer sp */void sbuf_deinit(sbuf_t *sp) { free(sp->buf);}
/* Insert item onto the rear of shared buffer sp */void sbuf_insert(sbuf_t *sp, int item) { P(&sp->slots); /* Wait for available slot */ P(&sp->mutex); /* Lock the buffer */ sp->buf[(++sp->rear)%(sp->n)] = item; /* Insert the item */ V(&sp->mutex); /* Unlock the buffer */ V(&sp->items); /* Announce available item */}
/* Remove and return the first item from buffer sp */int sbuf_remove(sbuf_t *sp) { int item; P(&sp->items); /* Wait for available item */ P(&sp->mutex); /* Lock the buffer */ item = sp->buf[(++sp->front)%(sp->n)]; /* Remove the item */ V(&sp->mutex); /* Unlock the buffer */ V(&sp->slots); /* Announce available slot */ return item;}Readers-Writers Problem
- Generalization of the mutual exclusion problem
- Problem statement:
- Reader threads only read the object
- Writer threads modify the object
- Writers must have exclusive access to the object
- Unlimited number of readers can access the object
- Occurs frequently in real systems:
- Online airline reservation system
- Multithreaded caching Web proxy
Variants of Readers-Writers
- First readers-writers problem (favors readers)
- No reader should be kept waiting unless a writer has already been granted permission to use the object
- A reader that arrives after a waiting writer gets priority over the writer
- Second readers-writers problem (favors writers)
- Once a writer is ready to write, it performs its write as soon as possible
- A reader that arrives after a writer must wait, even if the writer is also waiting
- Starvation (where a thread waits indefinitely) is possible in both cases
Solution to First Readers-Writers Problem
int readcnt; /* Initially = 0 */sem_t mutex, w; /* Initially = 1 */
void reader(void) { while (1) { P(&mutex); readcnt++; if (readcnt == 1) /* First in */ P(&w); V(&mutex);
/* Critical section */ /* Reading happens */
P(&mutex); readcnt--; if (readcnt == 0) /* Last out */ V(&w); V(&mutex); }}
void writer(void) { while (1) { P(&w);
/* Critical section */ /* Writing happens */
V(&w); }}Putting It All Together: Prethreaded Concurrent Server
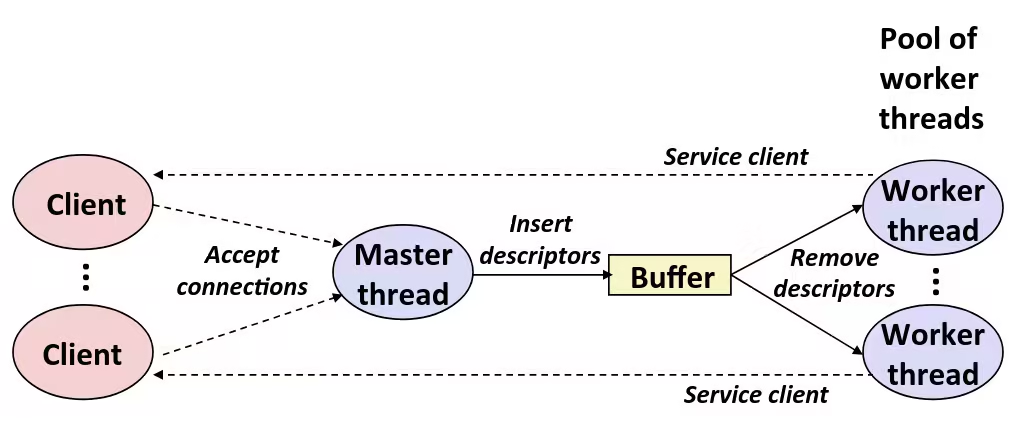
Prethreaded Concurrent Server
void *thread(void *vargp);
sbuf_t sbuf; /* Shared buffer of connected descriptors */
int main(int argc, char **argv) { int i, listenfd, connfd; socklen_t clientlen; struct sockaddr_storage clientaddr; pthread_t tid;
listenfd = open_listenfd(argv[1]); sbuf_init(&sbuf, SBUFSIZE); for (i = 0; i < NTHREADS; i++) /* Create worker threads */ pthread_create(&tid, NULL, thread, NULL); while (1) { clientlen = sizeof(struct sockaddr_storage); connfd = accept(listenfd, (SA *)&clientaddr, &clientlen); sbuf_insert(&sbuf, connfd); /* Insert connfd in buffer */ }}
void *thread(void *vargp) { pthread_detach(pthread_self()); while (1) { int connfd = sbuf_remove(&sbuf); /* Remove connfd from buf */ echo_cnt(connfd); /* Service client */ close(connfd); }}/* echo_cnt initialization routine */static int byte_cnt; /* Byte counter */static sem_t mutex; /* and the mutex that protects it */
static void init_echo_cnt(void) { sem_init(&mutex, 0, 1); byte_cnt = 0;}
/* Worker thread service routine */void echo_cnt(int connfd) { int n; char buf[MAXLINE]; rio_t rio; static pthread_once_t once = PTHREAD_ONCE_INIT;
pthread_once(&once, init_echo_cnt); rio_readinitb(&rio, connfd); while((n = rio_readlineb(&rio, buf, MAXLINE)) != 0) { P(&mutex); byte_cnt += n; printf("thread %d received %d (%d total) bytes on fd %d\n", (int)pthread_self(), n, byte_cnt, connfd); V(&mutex); rio_writen(connfd, buf, n); }}Crucial concept: Thread Safety
- Functions called from a thread must be thread‐safe
- Def: A function is thread-safe iff it will always produce correct results when called repeatedly from multiple concurrent threads
- Classes of thread-unsafe functions:
- Class 1: Functions that do not protect shared variables
- Class 2: Functions that keep state across multiple invocations
- Class 3: Functions that return a pointer to a static variable
- Class 4: Functions that call thread-unsafe functions
Thread-Unsafe Functions (Class 1)
- Failing to protect shared variables
- Fix: Use P and V semaphore operations
- Issue: Synchronization operations will slow down code
Thread-Unsafe Functions (Class 2)
- Relying on persistent state across multiple function invocations
- Example: Random number generator that relies on static state
static unsigned int next = 1;
/* rand: return pseudo-random integer on 0..32767 */int rand(void) { next = next*1103515245 + 12345; return (unsigned int)(next/65536) % 32768;}
/* srand: set seed for rand() */void srand(unsigned int seed) { next = seed;}Thread-Safe Random Number Generator
- Pass state as part of argument
- and, thereby, eliminate global state
/* rand_r - return pseudo-random integer on 0..32767 */
int rand_r(int *nextp) { *nextp = *nextp * 1103515245 + 12345; return (unsigned int)(*nextp/65536) % 32768;}- Consequence: programmer using rand_r must maintain seed
Thread-Unsafe Functions (Class 3)
- Returning a pointer to a static variable
- Fix 1. Rewrite function so caller passes address of variable to store result
- Requires changes in caller and callee
- Fix 2. Lock-and‐copy
- Requires simple changes in caller (and none in callee)
- However, caller must free memory
/* lock-and-copy version */char *ctime_ts(const time_t *timep, char *privatep) { char *sharedp;
P(&mutex); sharedp = ctime(timep); strcpy(privatep, sharedp); V(&mutex); return privatep;}Thread-Unsafe Functions (Class 4)
- Calling thread-unsafe functions
- Calling one thread-unsafe function makes the entire function that calls it thread-unsafe
- Fix: Modify the function so it calls only thread-safe functions
Reentrant Functions
- Def: A function is reentrant iff it accesses no shared variables when called by multiple threads
- Important subset of thread-safe functions
- Require no synchronization operations
- Only way to make a Class 2 function thread-safe is to make it reetnrant (e.g., rand_r)
- Important subset of thread-safe functions
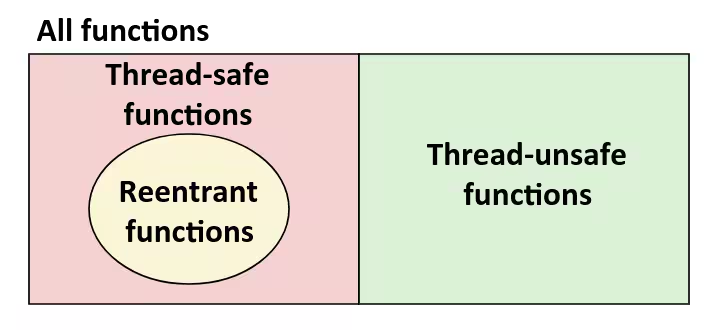
Thread-Safe Library Functions
- All functions in the Standard C Library (at the back of your K&R text) are thread-safe
- Examples: malloc, free, printf, scanf
- Most Unix system calls are thread-safe, with a few exceptions:
| Thread-unsafe function | Class | Reentrant version |
|---|---|---|
asctime | 3 | asctime_r |
ctime | 3 | ctime_r |
gethostbyaddr | 3 | gethostbyaddr_r |
gethostbyname | 3 | gethostbyname_r |
inet_ntoa | 3 | (none) |
localtime | 3 | localtime_r |
rand | 2 | rand_r |
Races
- A race occurs when correctness of the program depends on one thread reaching point x before another thread reaches point y
void *thread(void *vargp);
/* A threaded program with a race */int main() { pthread_t tid[N]; int i;
for (i = 0; i < N; i++) pthread_create(&tid[i], NULL, thread, &i); for (i = 0; i < N; i++) pthread_join(tid[i], NULL); exit(0);}
/* Thread routine */void *thread(void *vargp) { int myid = *((int *)vargp); printf("Hello from thread %d\n", myid); return NULL;}Race Illustration
for (i = 0; i < N; i++) pthread_create(&tid[i], NULL, thread, &i);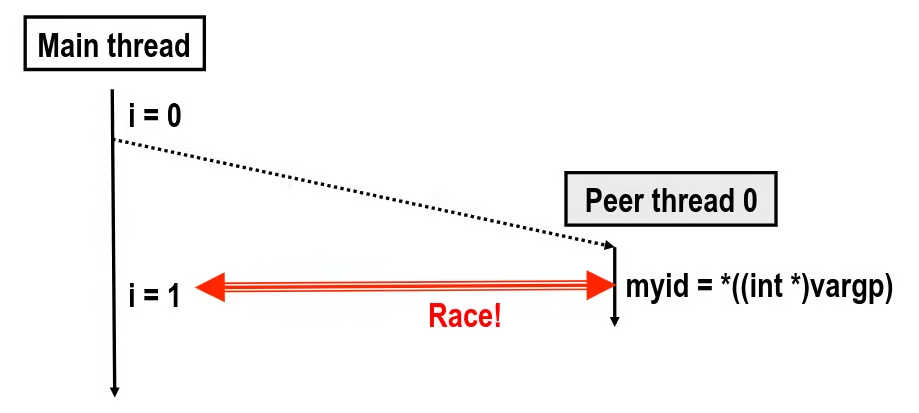
- Race between increment of i in main thread and deref of vargp in peer thread:
- If deref happens while
i = 0, then OK - Otherwise, peer thread gets wrong id value
- If deref happens while
Could this race really occur ?
Main thread:
int i;for (i = 0; i < 100; i++) { pthread_create(&tid, NULL, thread, &i);}Peer thread:
void *thread(void *vargp) { pthread_detach(pthread_self()); int i = *((int *)vargp); save_value(i); return NULL;}- Race Test
- If no race, then each thread would get different value of i
- Set of saved values would consist of one copy each of 0 through 99
Experimental Results
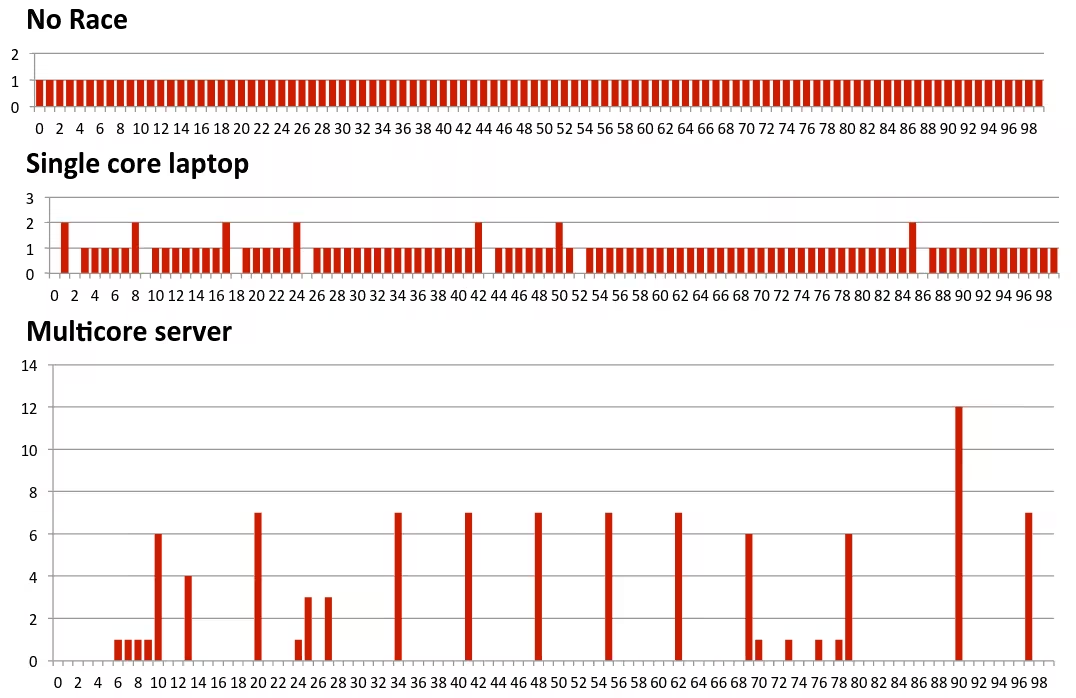
Race Elimination
/* Threaded program without the race */int main() { pthread_t tid[N]; int i, *ptr;
for (i = 0; i < N; i++) { ptr = malloc(sizeof(int)); *ptr = i; pthread_create(&tid[i], NULL, thread, ptr); } for (i = 0; i < N; i++) pthread_join(tid[i], NULL); exit(0);}
/* Thread routine */void *thread(void *vargp) { int myid = *((int *)vargp); free(vargp); printf("Hello from thread %d\n", myid); return NULL;}Deadlock
- Def: A process is deadlocked iff it is waiting for a condition that will never be true
- Typical Scenario:
- Processes 1 and 2 needs two resources (A and B) to proceed
- Process 1 acquires A, waits for B
- Process 2 acquires B, waits for A
- Both will wait forever !
Deadlocking With Semaphores
void *count(void *vargp);
int main() { pthread_t tid[2]; sem_init(&mutex[0], 0, 1); /* mutex[0] = 1 */ sem_init(&mutex[1], 0, 1); /* mutex[1] = 1 */ pthread_create(&tid[0], NULL, count, (void*)0); pthread_create(&tid[1], NULL, count, (void*)1); pthread_join(tid[0], NULL); pthread_join(tid[1], NULL); printf("cnt=%d\n", cnt); exit(0);}
void *count(void *vargp) { int i; int id = (int)vargp; for (i = 0; i < NITERS; i++) { P(&mutex[id]); P(&mutex[1-id]); cnt++; V(&mutex[id]); V(&mutex[1-id]); } return NULL;}Deadlock Visualized in Progress Graph
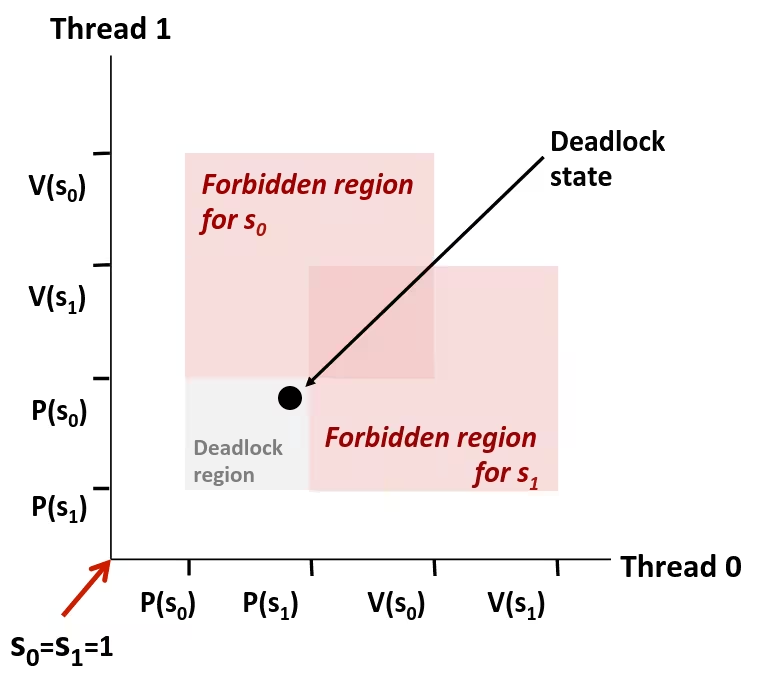
- Locking introduces the potential for deadlock
- Any trajectory that enters the deadlock region will eventually reach the deadlock state, waiting for either or to become nonzero
- Other trajectories luck out and skirt the deadlock region
- Unfortunate fact: deadlock is often nondeterministic (race)
Avoiding Deadlock: Acquire shared resources in same order
int main() { pthread_t tid[2]; sem_init(&mutex[0], 0, 1); /* mutex[0] = 1 */ sem_init(&mutex[1], 0, 1); /* mutex[1] = 1 */ pthread_create(&tid[0], NULL, count, (void*) 0); pthread_create(&tid[1], NULL, count, (void*) 1); pthread_join(tid[0], NULL); pthread_join(tid[1], NULL); printf("cnt=%d\n", cnt); exit(0);}
void *count(void *vargp) { int i; int id = (int) vargp; for (i = 0; i < NITERS; i++) { P(&mutex[0]); P(&mutex[1]); cnt++; V(&mutex[id]); V(&mutex[1-id]); } return NULL;}Avoided Deadlock in Progress Graph
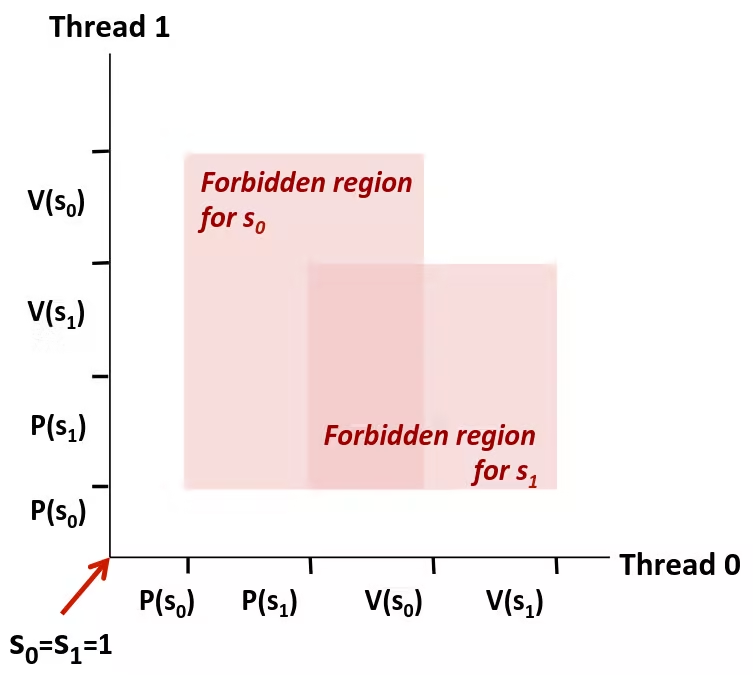
- No way for trajectory to get stuck
- Processes acquire locks in same order
- Order in which locks released immaterial
Thread-Level Parallelism
- Parallel Computing Hardware
- Multicore
- Multiple separate processors on single chip
- Hyperthreading
- Efficient execution of multiple threads on single core
- Multicore
Typical Multicore Processor
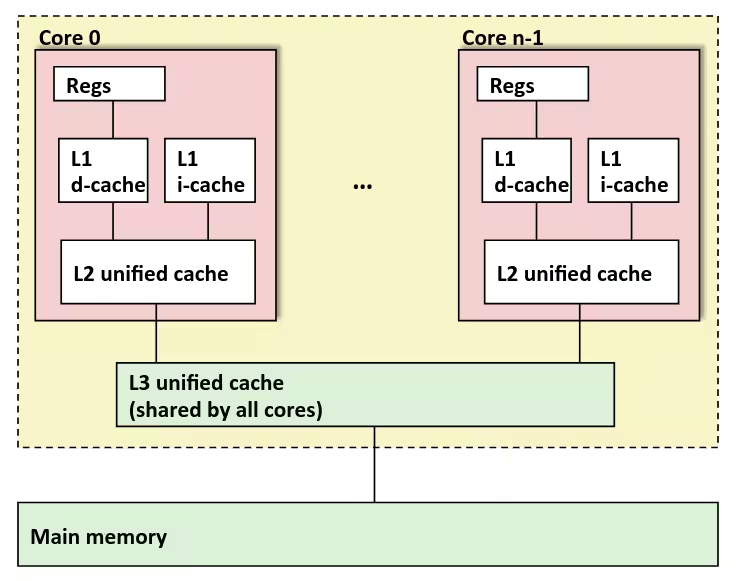
- Multiple processors operating with coherent view of memory
Out-of-Order Processor Structure
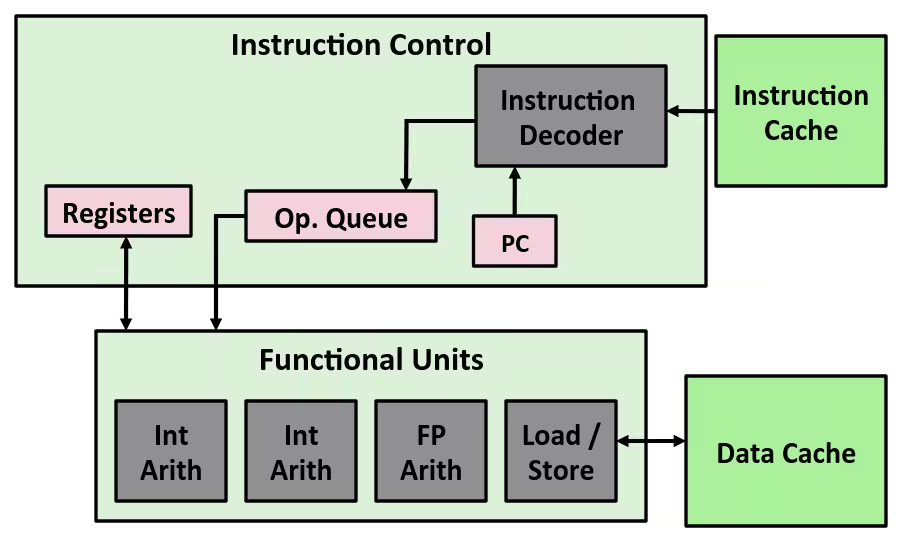
- Instruction control dynamically converts program into stream of operations
- Operations mapped onto functional units to execute in parallel
Hyperthreading Implementation
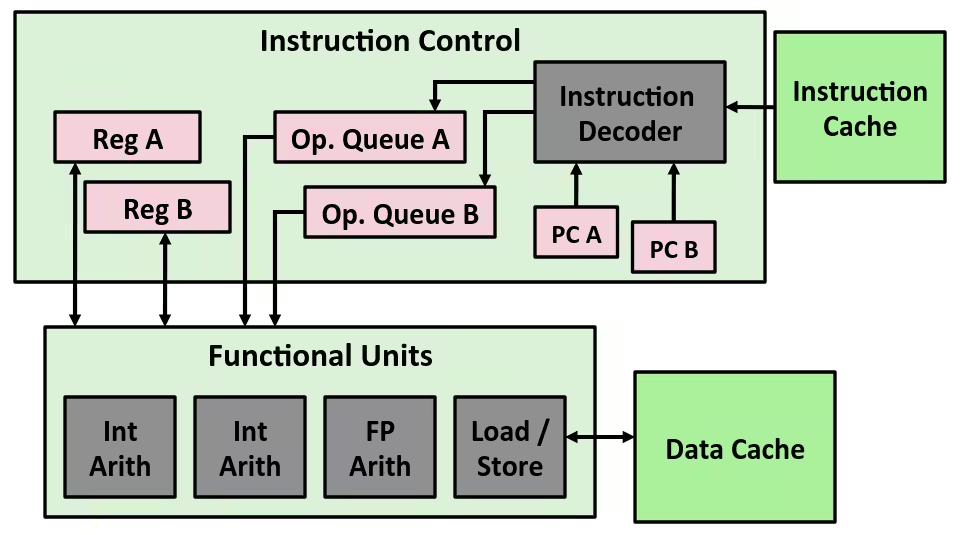
- Replicate enough instruction control to process K instruction streams
- K copies of all registers
- Share functional units
Example: Parallel Summation
- Sum numbers
- Should add up to
- Partition values into t ranges
- values in each range
- Each of t threads processes 1 range
- For simplicity, assume n is a multiple of t
First attempt: psum-mutex
- Simplest approach: Threads sum into a global variable protected by a semaphore mutex
void *sum_mutex(void *vargp);
long gsum = 0; /* Global sum */long nelems_per_thread; /* Number of elements to sum */sem_t mutex; /* Mutex to protect global sum */
int main(int argc, char **argv) { long i, nelems, log_nelems, nthreads, myid[MAXTHREADS]; pthread_t tid[MAXTHREADS]; /* Get input arguments */ nthreads = atoi(argv[1]); log_nelems = atoi(argv[2]); nelems = (1L << log_nelems); nelems_per_thread = nelems / nthreads; sem_init(&mutex, 0, 1);
/* Create peer threads and wait for them to finish */ for (i = 0; i < nthreads; i++) { myid[i] = i; pthread_create(&tid[i], NULL, sum_mutex, &myid[i]); }
for (i = 0; i < nthreads; i++) pthread_join(tid[i], NULL);
/* Check final answer */ if (gsum != (nelems * (nelems-1))/2) printf("Error: result=%ld\n", gsum); exit(0);}
void *sum_mutex(void *vargp) { long myid = *((long *)vargp); /* Extract thread ID */ long start = myid * nelems_per_thread; /* Start element index */ long end = start + nelems_per_thread; /* End element index */ long i;
for (i = start; i < end; i++) { P(&mutex); gsum += i; V(&mutex); } return NULL;}psum-mutex Performance
- Shark machine with 8 cores,

- Nasty surprise:
- Single thread is very slow
- Gets slower as we use more cores
Next Attempt: psum-array
- Peer thread i sums into global array element psum[i]
- Main waits for threads to finish, then sums elements of psum
- Eliminates need for mutex synchronization
void *sum_array(void *vargp) { long myid = *((long *)vargp); /* Extract thread ID */ long start = myid * nelems_per_thread; /* Start element index */ long end = start + nelems_per_thread; /* End element index */ long i;
for (i = start; i < end; i++) { psum[myid] += i; } return NULL;}psum-array Performance
- Orders of magnitude faster than psum-mutex
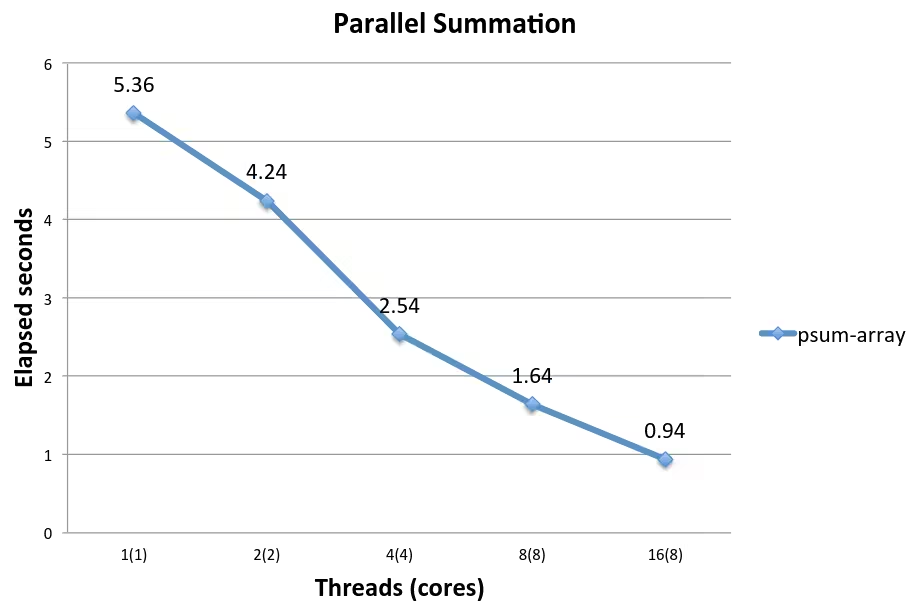
Next Attempt: psum-local
- Reduce memory references by having peer thread i sum into a local variable (register)
void *sum_local(void *vargp) { long myid = *((long *)vargp); /* Extract thread ID */ long start = myid * nelems_per_thread; /* Start element index */ long end = start + nelems_per_thread; /* End element index */ long i, sum = 0;
for (i = start; i < end; i++) { sum += i; } psum[myid] = sum; return NULL;}psum-local Performance
- Significantly faster than psum-array
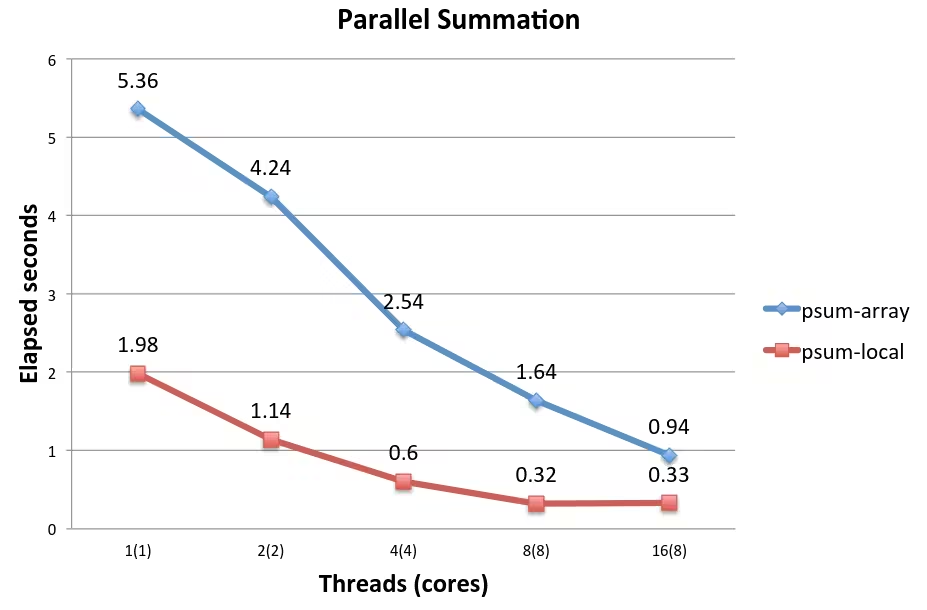
Characterizing Parallel Program Performance
- processor cores, is the running time using cores
- Def. Speedup:
- is relative speedup if is running time of parallel version of the code running on 1 core
- is absolute speedup if is running time of sequential version of code running on 1 core
- Absolute speedup is a much truer measure of the benefits of parallelism
- Def. Efficiency:
- Reported as a percentage in the range
- Measures the overhead due to parallelization
Performance of psum-local
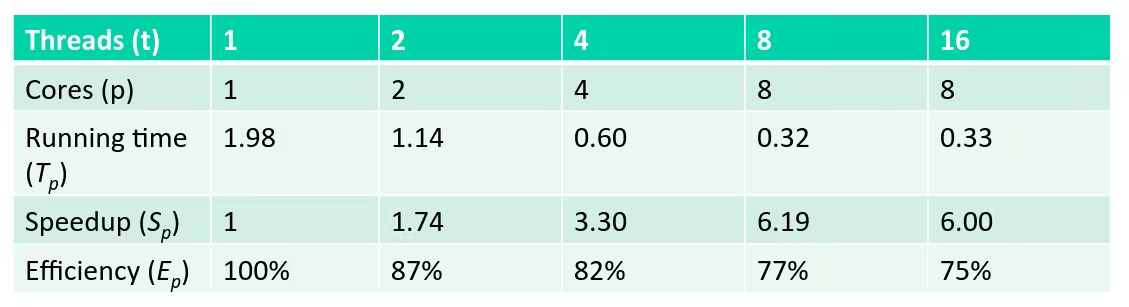
- Efficiencies OK, not great
- Our example is easily parallelizable
- Real codes are often much harder to parallelize
Amdahl’s Law
- Gene Amdahl (Nov. 16, 1922 – Nov. 10, 2015)
- Captures the difficulty of using parallelism to speed things up
- Overall problem
- - Total sequential time required
- - Fraction of total that can be sped up ()
- - Speedup factor
- Resulting Performance
-
- Portion which can be sped up runs times faster
- Portion which cannot be sped up stays the same
- Least possible running time:
-
Amdahl’s Law Example
- Overall problem
- Resulting Performance
- Least possible running time:
A More Substantial Example: Sort
- Sort set of random numbers
- Multiple possible algorithms
- Use parallel version of quicksort
- Sequential quicksort of set of values
- Choose “pivot” from
- Rearrange into
- : Values
- : Values
- Recursively sort to get
- Recursively sort to get
- Return
Sequential Quicksort Visualized
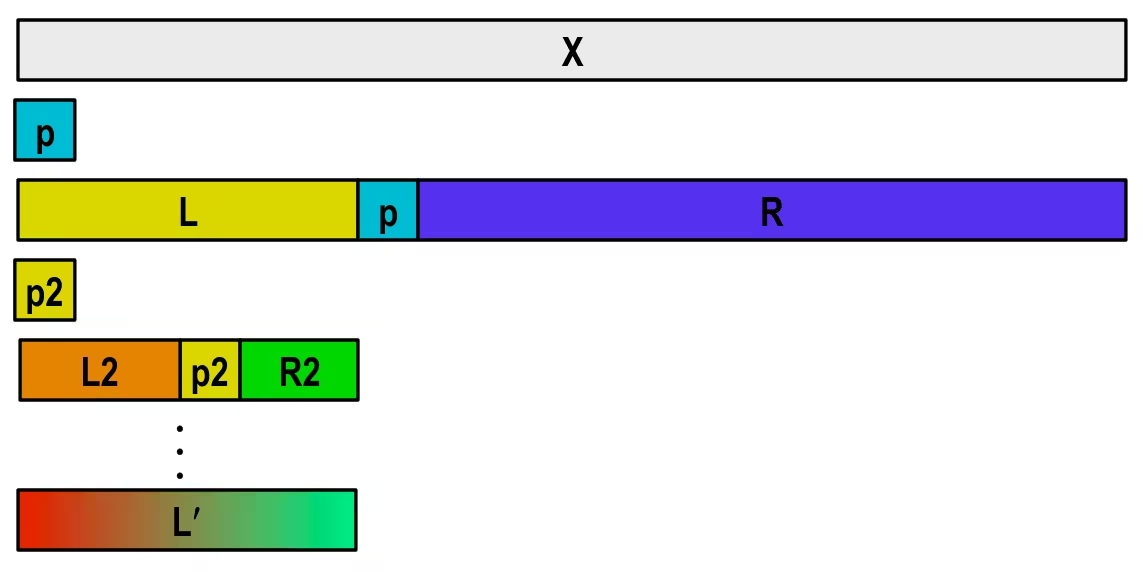
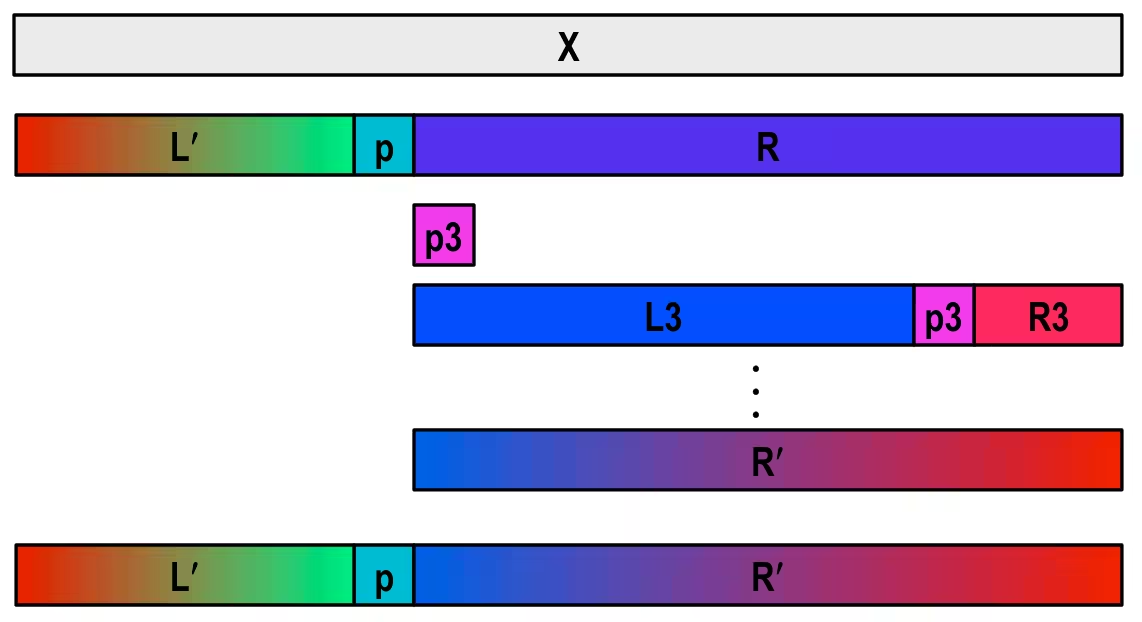
Sequential Quicksort Code
void qsort_serial(data_t *base, size_t nele) { if (nele <= 1) return; if (nele == 2) { if (base[0] > base[1]) swap(base, base+1); return; }
/* Partition returns index of pivot */ size_t m = partition(base, nele); if (m > 1) qsort_serial(base, m); if (nele-1 > m+1) qsort_serial(base+m+1, nele-m-1);}- Sort nele elements starting at base
- Recursively sort or if has more than one element
Parallel Quicksort
- Parallel quicksort of set of values
- If , do sequential quicksort
- Else
- Choose “pivot” from
- Rearrange into
- : Values
- : Values
- Recursively spawn separate threads
- Sort to get
- Sort to get
- Return
Parallel Quicksort Visualized
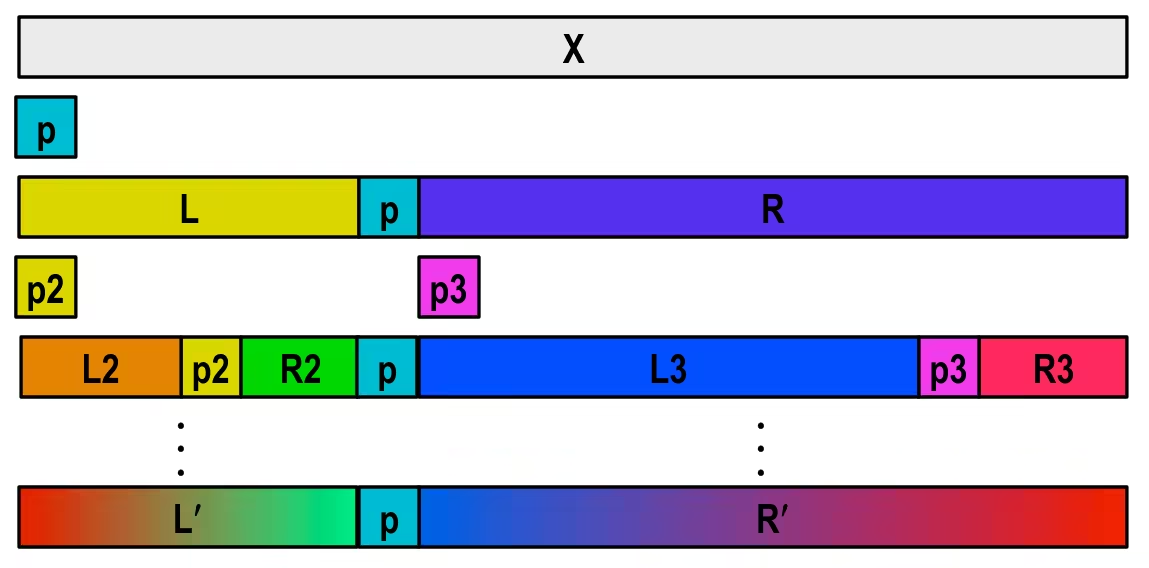
Thread Structure: Sorting Tasks
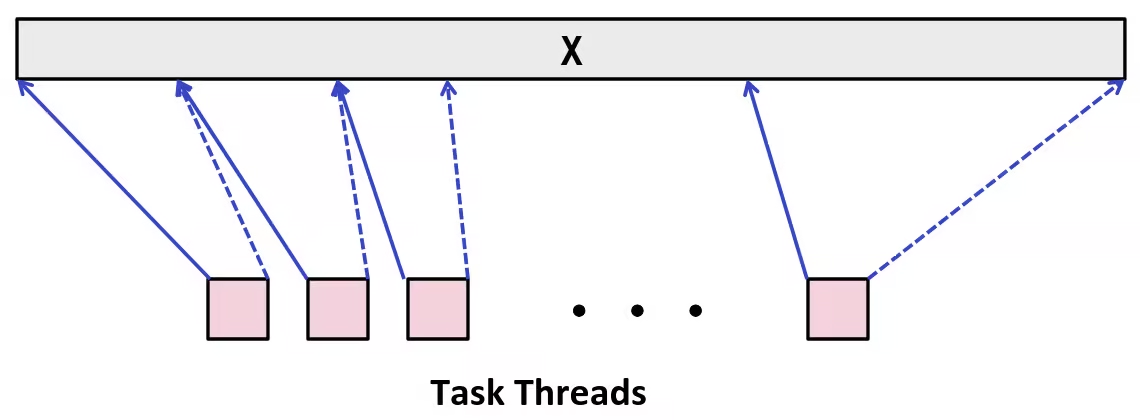
- Task: Sort subrange of data
- Specify as:
- base: Starting address
- nele: Number of elements in subrange
- Specify as:
- Run as separate thread
Small Sort Task Operation
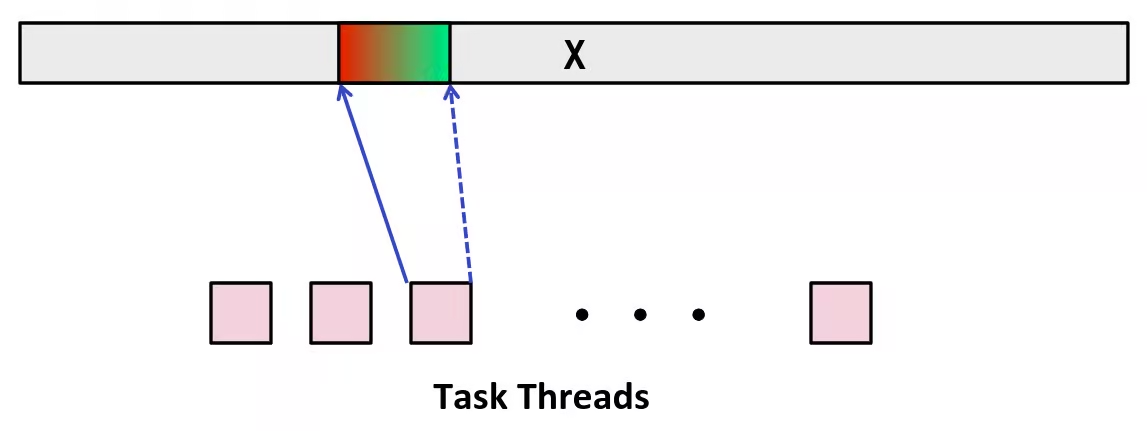
- Sort subrange using serial quicksort
Large Sort Task Operation
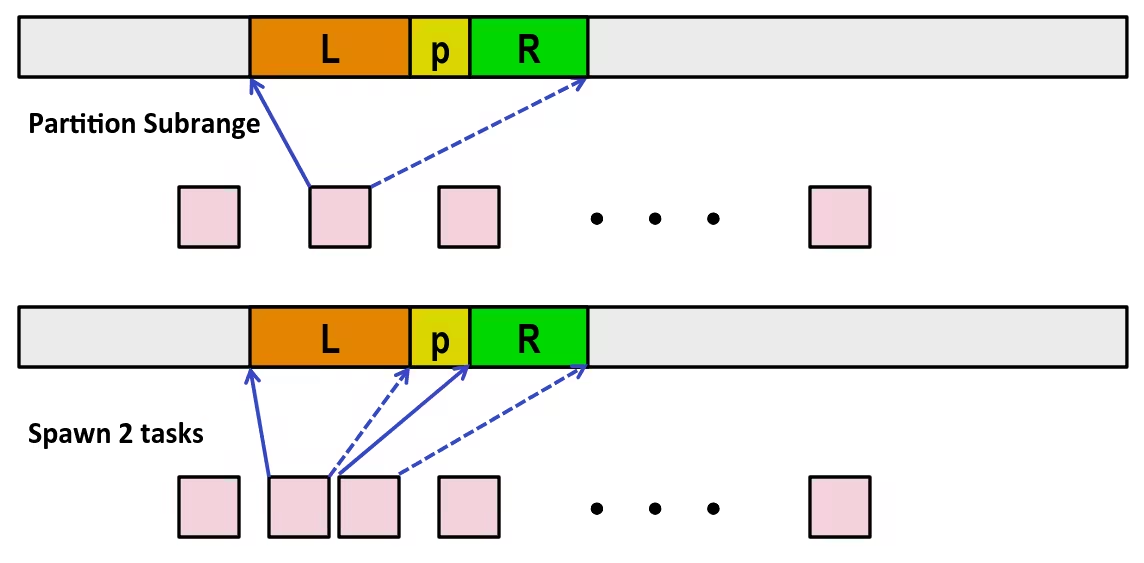
Top-Level Function (Simplified)
void tqsort(data_t *base, size_t nele) { init_task(nele); global_base = base; global_end = global_base + nele - 1; task_queue_ptr tq = new_task_queue(); tqsort_helper(base, nele, tq); join_tasks(tq); free_task_queue(tq);}- Sets up data structures
- Calls recursive sort routine
- Keeps joining threads until none left
- Frees data structures
Recursive sort routine (Simplified)
/* Multi-threaded quicksort */static void tqsort_helper(data_t *base, size_t nele, task_queue_ptr tq) { if (nele <= nele_max_sort_serial) { /* Use sequential sort */ qsort_serial(base, nele); return; } sort_task_t *t = new_task(base, nele, tq); spawn_task(tq, sort_thread, (void *) t);}- Small partition: Sort serially
- Large partition: Spawn new sort task
Sort task thread (Simplified)
/* Thread routine for many-threaded quicksort */static void *sort_thread(void *vargp) { sort_task_t *t = (sort_task_t *) vargp; data_t *base = t->base; size_t nele = t->nele; task_queue_ptr tq = t->tq; free(vargp); size_t m = partition(base, nele); if (m > 1) tqsort_helper(base, m, tq); if (nele-1 > m+1) tqsort_helper(base+m+1, nele-m-1, tq); return NULL;}- Get task parameters
- Perform partitioning step
- Call recursive sort routine on each partition
Parallel Quicksort Performance
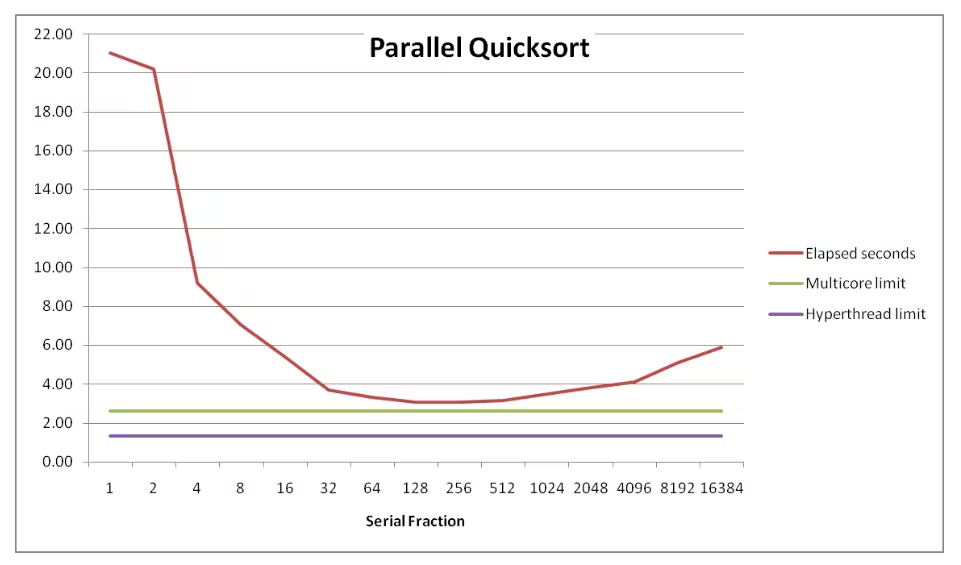
- Serial fraction: Fraction of input at which do serial sort
- Sort (134,217,728) random values
- Best speedup = 6.84X
- Good performance over wide range of fraction values
- F too small: Not enough parallelism
- F too large: Thread overhead + run out of thread memory
Amdahl’s Law & Parallel Quicksort
- Sequential bottleneck
- Top-level partition: No speedup
- Second level: speedup
- level: speedup
- Implications
- Good performance for small-scale parallelism
- Would need to parallelize partitioning step to get large-scale parallelism
- Parallel Sorting by Regular Sampling (H. Shi & J. Schaeffer, J. Parallel & Distributed Computing, 1992)
Parallelizing Partitioning Step
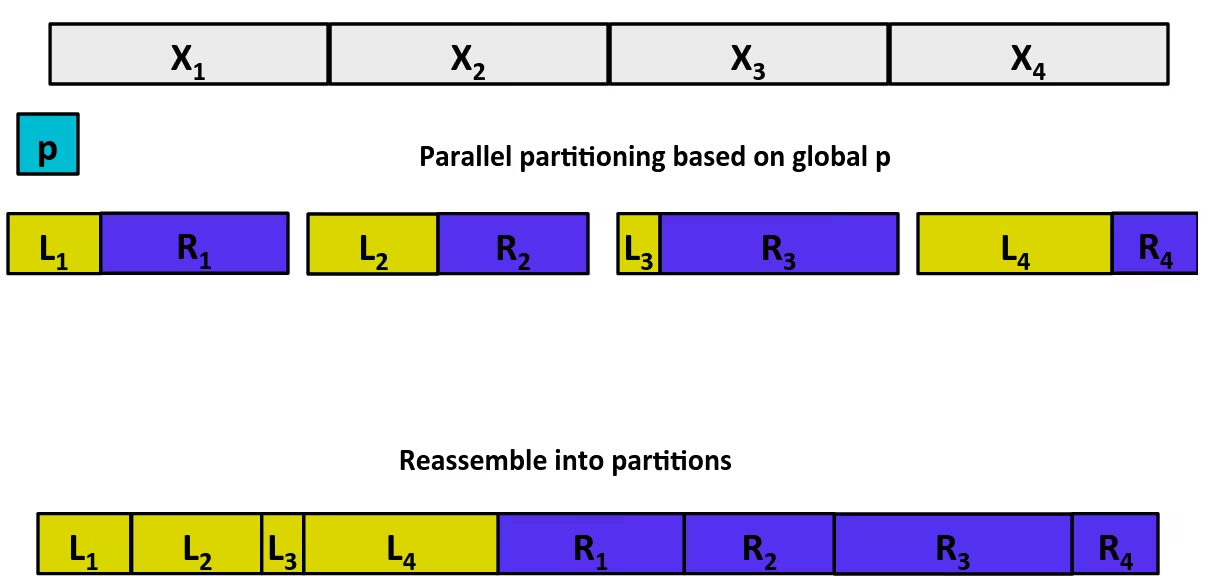
Experience with Parallel Partitioning
- Could not obtain speedup
- Speculate: Too much data copying
- Could not do everything within source array
- Set up temporary space for reassembling partition
Lessons Learned
- Must have parallelization strategy
- Partition into k independent parts
- Divide-and-conquer
- Inner loops must be synchronization free
- Synchronization operations very expensive
- Beware of Amdahl’s Law
- Serial code can become bottleneck
Memory Consistency
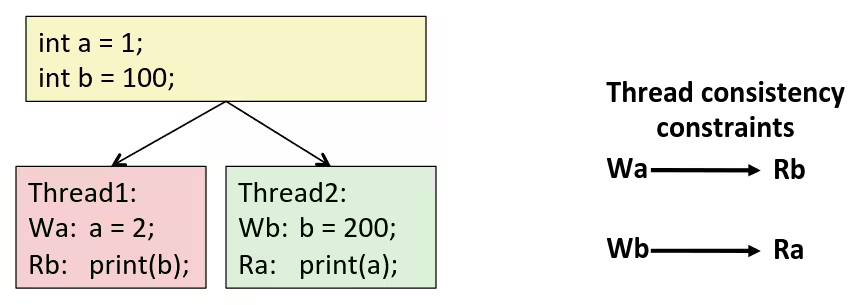
- What are the possible values printed ?
- Depends on memory consistency model
- Abstract model of how hardware handles concurrent accesses
- Sequential consistency
- Overall effect consistent with each individual thread
- Otherwise, arbitrary interleaving
Sequential Consistency Example
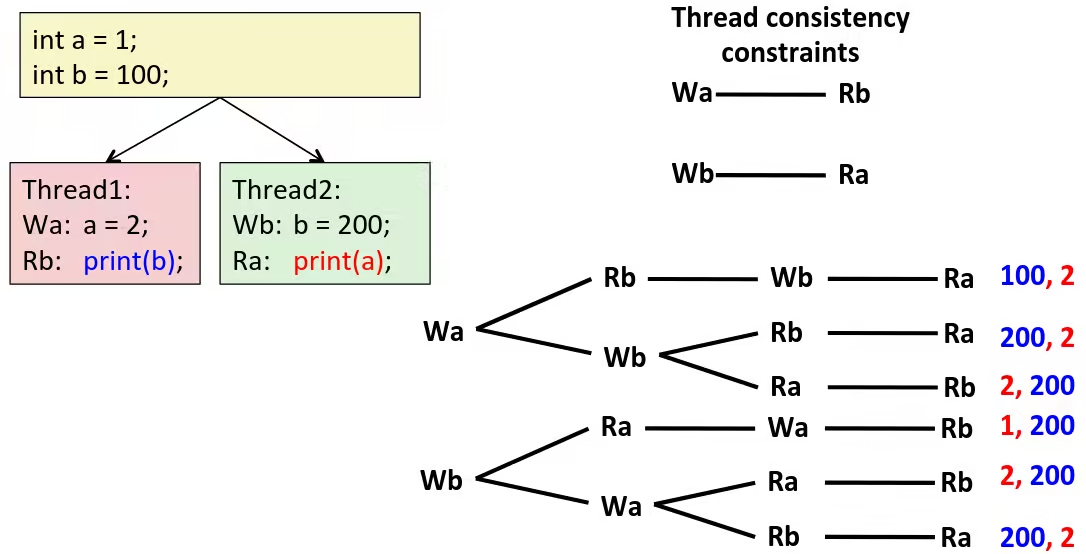
- Impossible outputs
- 100, 1 and 1, 100
- Would require reaching both Ra and Rb before Wa and Wb
Non-Coherent Cache Scenario
- Write-back caches, without coordination between them
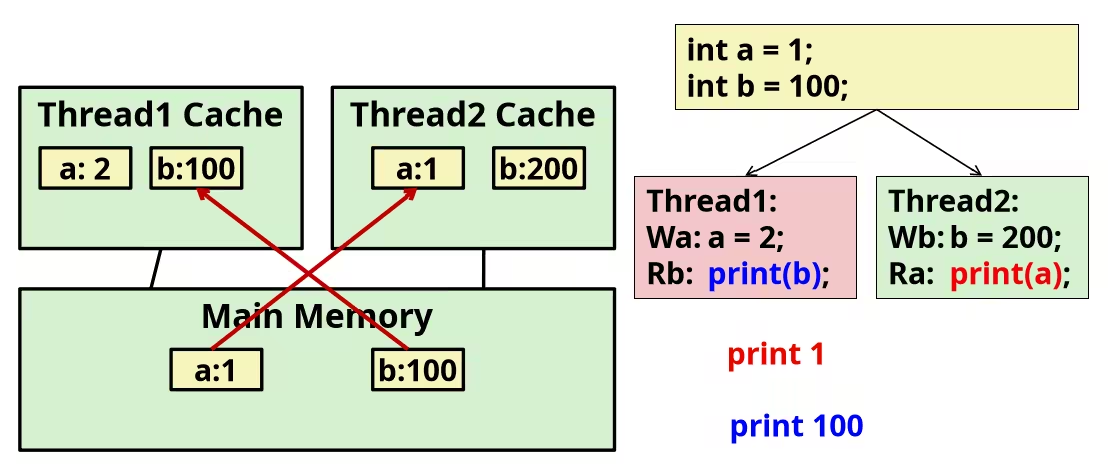
Snoopy Caches
- Tag each cache block with state
Invalid- Cannot use valueShared- Readable copyExclusive- Writeable copy
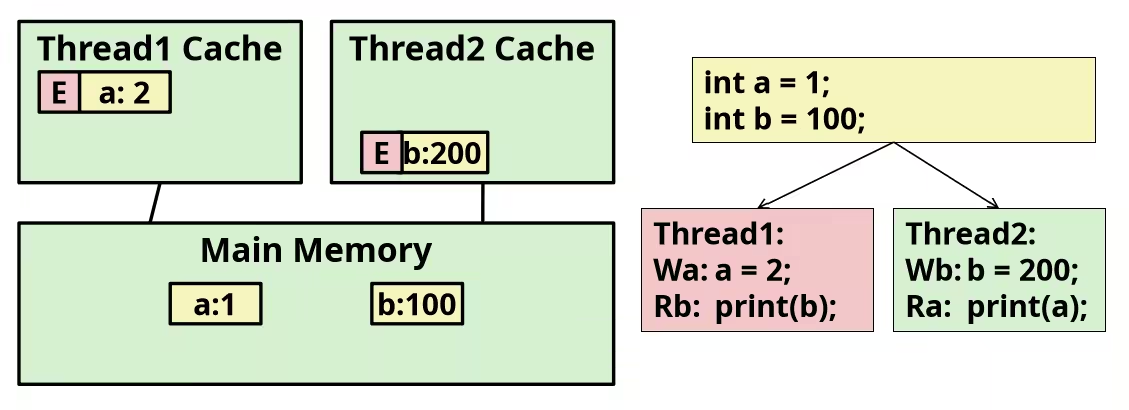
- When cache sees request for one of its E-tagged blocks
- Supply value from cache
- Set tag to S